
| フラット表示 | 前のトピック | 次のトピック |
| 投稿者 | スレッド |
|---|---|
| webadm | 投稿日時: 2010-5-26 11:41 |
Webmaster  登録日: 2004-11-7 居住地: 投稿: 3082 |
アドミッタンスパラメータと4端子定数 次ぎはアドミッタンスパラメータと4端子定数の間の変換式を導く問題。
アドミッタンスパラメータ(Y行列)とはなにか思い出すと 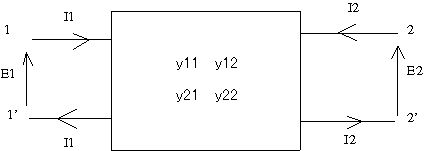 上記の回路で が成り立つことを表す。 一方で4端子対定数(F行列)は 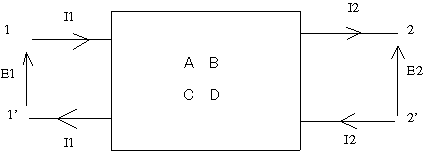 上記の回路で が成り立つことを意味する。 2つの回路ではI2の向きが逆なので注意しながらYパラメータの条件(E2=0,E1=0)をF行列表現の式に適用すると これらの関係からYパラメータは とFパラメータ要素で表される。 同様にFパラメータの条件でFパラメータをYパラメータで書き直しても良いが、上記の関係式をFパラメータに付いて解くと ということになる。 P.S 最初同じ要領でFパラメータをYパラメータで表すことを試みたらどうも結果がおかしいので、先に導いたYパラメータをFパラメータで表した関係から逆に導いたのだが、よく見たら理論の時のFパラメータ条件をI2=0ではなくI1=0と誤記していたのが原因だった。それで矛盾が生じたというわけである。なのでFパラメータの条件(I2=0とE2=0)をYパラメータの回路に当てはめてI2の極性に注意すれば同じ結果が得られるはずである。 あと、線形代数をうまく使って同じ結果が得られると思うのだが、これも読者の課題としよう(´∀` ) P.S 後の問題でここの解を利用したらおかしな結果にしかならないので、良くみたら式の途中で痛恨の転記ミス発見(;´Д`) (2010/05/30) Y-F変換の導出過程でCの最初の式に転記ミスがあったのを今更修正 2012/11/4) |
| フラット表示 | 前のトピック | 次のトピック |
| 題名 | 投稿者 | 日時 |
|---|---|---|
| |
webadm | 2010-5-20 4:53 |
| |
webadm | 2010-5-20 5:54 |
| |
webadm | 2010-5-22 23:43 |
| |
webadm | 2010-5-23 1:32 |
| |
webadm | 2010-5-23 10:12 |
| |
webadm | 2010-5-23 16:25 |
| |
webadm | 2010-5-23 16:33 |
| |
webadm | 2010-5-23 17:20 |
| |
webadm | 2010-5-23 17:58 |
| |
webadm | 2010-5-24 17:53 |
| » |
webadm | 2010-5-26 11:41 |
| |
webadm | 2010-5-26 14:34 |
| |
webadm | 2010-5-26 15:14 |
| |
webadm | 2010-5-27 3:18 |
| |
webadm | 2010-5-27 13:50 |
| |
webadm | 2010-5-27 22:14 |
| |
webadm | 2010-5-29 3:39 |
| |
webadm | 2010-5-29 11:27 |
| |
webadm | 2010-5-29 11:57 |
| |
webadm | 2010-5-30 11:15 |
| |
webadm | 2010-5-30 12:37 |
| |
webadm | 2010-5-30 12:45 |
| |
webadm | 2010-6-3 12:42 |
| |
webadm | 2010-6-5 13:04 |
| |
webadm | 2010-6-5 13:44 |
| |
webadm | 2010-6-12 22:30 |
| |
webadm | 2010-6-13 5:07 |
| |
webadm | 2010-6-17 5:13 |
| |
webadm | 2010-6-17 16:21 |
| |
webadm | 2010-6-17 19:40 |
| |
webadm | 2010-6-22 18:50 |
| |
webadm | 2010-6-25 21:54 |
| |
webadm | 2010-6-26 0:45 |
| |
webadm | 2010-6-26 11:27 |
| |
webadm | 2010-6-26 21:55 |
| |
webadm | 2010-6-27 0:05 |
| |
webadm | 2010-6-28 21:04 |
| |
webadm | 2010-6-29 18:16 |
| |
webadm | 2010-7-8 21:06 |
| |
webadm | 2010-7-28 6:11 |
| |
webadm | 2010-8-17 10:44 |
| |
webadm | 2010-8-17 20:48 |
| |
webadm | 2010-8-18 3:42 |
| |
webadm | 2010-8-21 10:11 |
| |
webadm | 2010-10-31 3:26 |
| |
webadm | 2010-11-19 2:41 |
| |
webadm | 2010-11-23 21:29 |
| |
webadm | 2010-11-25 9:18 |
| |
webadm | 2010-11-30 0:01 |
| |
webadm | 2010-11-30 9:27 |
| |
webadm | 2010-11-30 23:28 |
| |
webadm | 2010-12-3 8:26 |
| |
webadm | 2010-12-8 9:13 |
| |
webadm | 2010-12-8 10:37 |
| |
webadm | 2010-12-9 22:51 |
| |
webadm | 2010-12-10 0:17 |
| |
webadm | 2010-12-14 6:51 |
| |
webadm | 2010-12-14 7:03 |
| |
webadm | 2010-12-20 10:10 |
| |
webadm | 2010-12-20 22:52 |
| |
webadm | 2010-12-23 13:53 |
| |
webadm | 2010-12-23 21:54 |
| |
webadm | 2011-4-22 7:02 |
| |
webadm | 2011-4-22 9:38 |
| 投稿するにはまず登録を | |
