
| フラット表示 | 前のトピック | 次のトピック |
| 投稿者 | スレッド |
|---|---|
| webadm | 投稿日時: 2010-6-17 16:21 |
Webmaster  登録日: 2004-11-7 居住地: 投稿: 3086 |
影像インピーダンス 次ぎは影像インピーダンスの理解を試す問題。
以下の回路で端子対1-1'から見た駆動点インピーダンスがZ01に等しく、端子対2-2'から見た駆動点インピーダンスがZ02に等しくなるようにするにはZ01,Z02をどのように選べば良いか導けというもの。 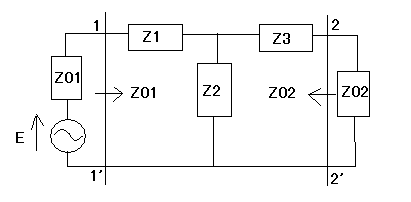 影像インピーダンスの問題だと気づかないと大変難しい問題となる。問題文には一言も影像インピーダンスとは書いていないので用語と公式一夜漬けだと落とす問題。実務でもそういわれれば知っているが、言われるまでそうとは気が付かないということがよくある。 影像インピーダンスを導く問題だとわかれば簡単だが、そうとわからないようにしているところがひっかけ問題である。 著者の解答は記憶力優秀で公式を正確に記憶して思い出せる場合の解答である。 しかし人は思い出した時には既に記憶があやふやだということが少なくない。Z01=sqrt(AB/CD)だったかな、いやAC/BDだったかもしれないとか、いろいろ組み合わせがあったのを思い出してしまってどれがどれだか混乱してしまう。大抵そういうときは間違った記憶に基づいて計算して出来たつもりになってしまう。計算自体は式が間違っていても結果は出るからね。 ここではずぼらな一夜漬けもせず暗記もしない、もしくは一夜漬けはしたけど肝心の公式を忘れてしまったという場合の解法をやってみよう。公式を忘れても固有値問題のことを忘れていなければ問題ない。 最初に二端子対回路としての伝送行列をもとめると3つの部分回路に分けてその縦続接続とすれば 次ぎに端子対2-2'に鏡を置いて端子対1-1'から眺めたような対称回路の伝送行列を求めてその固有ベクトルとして影像インピーダンスZ01を求める。 同様に反対向きも ということになる。 ところで既に賢明な読者は2つの対称回路で違うのはZ1とZ3の位置だけだということにお気づきだろう。Z02は計算せずともZ01の式のZ1とZ3をスワップすれば良い。 元の回路が対称回路の場合にはZ1=Z3であることから ということになる。 P.S 前問と同じだという思われるかもしれない。その通りだ。馬鹿の一つ覚えというやつである。(゚ε゚)キニシナイ!!(゚ε゚)キニシナイ!! |
| フラット表示 | 前のトピック | 次のトピック |
| 題名 | 投稿者 | 日時 |
|---|---|---|
| |
webadm | 2010-5-20 4:53 |
| |
webadm | 2010-5-20 5:54 |
| |
webadm | 2010-5-22 23:43 |
| |
webadm | 2010-5-23 1:32 |
| |
webadm | 2010-5-23 10:12 |
| |
webadm | 2010-5-23 16:25 |
| |
webadm | 2010-5-23 16:33 |
| |
webadm | 2010-5-23 17:20 |
| |
webadm | 2010-5-23 17:58 |
| |
webadm | 2010-5-24 17:53 |
| |
webadm | 2010-5-26 11:41 |
| |
webadm | 2010-5-26 14:34 |
| |
webadm | 2010-5-26 15:14 |
| |
webadm | 2010-5-27 3:18 |
| |
webadm | 2010-5-27 13:50 |
| |
webadm | 2010-5-27 22:14 |
| |
webadm | 2010-5-29 3:39 |
| |
webadm | 2010-5-29 11:27 |
| |
webadm | 2010-5-29 11:57 |
| |
webadm | 2010-5-30 11:15 |
| |
webadm | 2010-5-30 12:37 |
| |
webadm | 2010-5-30 12:45 |
| |
webadm | 2010-6-3 12:42 |
| |
webadm | 2010-6-5 13:04 |
| |
webadm | 2010-6-5 13:44 |
| |
webadm | 2010-6-12 22:30 |
| |
webadm | 2010-6-13 5:07 |
| |
webadm | 2010-6-17 5:13 |
| » |
webadm | 2010-6-17 16:21 |
| |
webadm | 2010-6-17 19:40 |
| |
webadm | 2010-6-22 18:50 |
| |
webadm | 2010-6-25 21:54 |
| |
webadm | 2010-6-26 0:45 |
| |
webadm | 2010-6-26 11:27 |
| |
webadm | 2010-6-26 21:55 |
| |
webadm | 2010-6-27 0:05 |
| |
webadm | 2010-6-28 21:04 |
| |
webadm | 2010-6-29 18:16 |
| |
webadm | 2010-7-8 21:06 |
| |
webadm | 2010-7-28 6:11 |
| |
webadm | 2010-8-17 10:44 |
| |
webadm | 2010-8-17 20:48 |
| |
webadm | 2010-8-18 3:42 |
| |
webadm | 2010-8-21 10:11 |
| |
webadm | 2010-10-31 3:26 |
| |
webadm | 2010-11-19 2:41 |
| |
webadm | 2010-11-23 21:29 |
| |
webadm | 2010-11-25 9:18 |
| |
webadm | 2010-11-30 0:01 |
| |
webadm | 2010-11-30 9:27 |
| |
webadm | 2010-11-30 23:28 |
| |
webadm | 2010-12-3 8:26 |
| |
webadm | 2010-12-8 9:13 |
| |
webadm | 2010-12-8 10:37 |
| |
webadm | 2010-12-9 22:51 |
| |
webadm | 2010-12-10 0:17 |
| |
webadm | 2010-12-14 6:51 |
| |
webadm | 2010-12-14 7:03 |
| |
webadm | 2010-12-20 10:10 |
| |
webadm | 2010-12-20 22:52 |
| |
webadm | 2010-12-23 13:53 |
| |
webadm | 2010-12-23 21:54 |
| |
webadm | 2011-4-22 7:02 |
| |
webadm | 2011-4-22 9:38 |
| 投稿するにはまず登録を | |
