
| フラット表示 | 前のトピック | 次のトピック |
| 投稿者 | スレッド |
|---|---|
| webadm | 投稿日時: 2010-6-17 19:40 |
Webmaster  登録日: 2004-11-7 居住地: 投稿: 3084 |
続:影像インピーダンス 次ぎも影像インピーダンスを求める問題。
以下の回路の左端及び右端から見た影像インピーダンスを求めよというもの 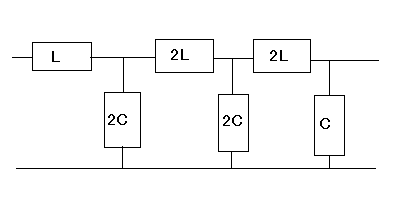 著者は計算を少なくするために予め工夫している興味深い方法を示している。昔は計算は計算尺か対数表(吐血)を使って人間がやるしかないので時間的にも労力的にもコストが高かった。なので計算量はなるべく減らした方が良いという考えが支配的だった。Gaussは計算好きというか、計算を理論的に改良する趣味を持っていた。無理数を小数点以下できるだけ長く計算するために少ない労力で正確に短時間に済む方法を考えていたので、計算など弟子にやらせればと言われると憤慨したという。 電気回路でもこれまでの問題で見てきたようにたかがT型回路を2つ縦続接続するだけで固有値問題を解くのに大変な数式のボリュームになる。Maximaのような数式処理ソフトが傍らにあるのでなんとか扱えるが、それ無しでやるとなると転記ミスやらなにやらで手に負えないかもしれない。なので闇雲に計算に頼らずにもっと易しい別解があればそちらを見つけた方がトータルでは良い結果になるかもしれない。実務では特許とかいろいろのしがらみがあって既知の解法は使えないため多少劣った方法でも別解を使わざるを得ない場合がある。ソフトウェアでは特に物理的な見た目とか使い勝手は特許になっている可能性があるので、そのまま真似するのは禁物である。ましてや他人のコードを事前の承諾なく流用することなども。必要であれば同じことをするコードを新たにゼロから書き下ろすということも必要になる。クリーンルーム開発というやつである。ベトナムとかソフトウェア開発コストが日本の一割(関税を除く)で済むところにそうしたクリーンルーム開発を委託すれば、オリジナルのコードが少ない予算で手にいれることができる。ゼロから書くなら誰がやっても同じだから格安なとこに頼めばよいと考えるからである。しかし裏でそれがどっかに流れて似たようなものが他社でもっと短時間で開発されるというリスクはある。誰も監視できないしね。日本の大手ソフトハウスが国内で受注して開発したはずの防衛関係のソフトのソースコードを偶然関係者が眺めたら、誰も読まない中国語のコメントの中に中国人民軍所有と書いてあったとか、なかったとか。 なんの話しだったっけ。影像インピーダンスの話しだった。 出題者の意図は闇雲に時間と手間をかけて計算させることではない。二端子対回路と影像インピーダンスについて良く学んでいれば、対称回路の影像インピーダンスは両端で対称となることを知っているはずであるとふんでいる。そうすると非対称な部分だけに注意を払えばよいことになる。 そうしたベストアンサーを知りたい人は著者の解法を読んでもらうとして。ここでは別解で著者と同じ結果になるか、著者の解は正しいのかを検証することにしよう。 ここではまずへそ曲がりな発想として、問題のラダー回路を構成する部分回路に着目しよう。各部分回路はそれぞれどんな影像パラメータを持つのだろうか。そしてそれらが縦続接続した場合にどう変わるのか。これについてはどんな電気回路理論の本も扱っていない。 対称二端子対回路の伝送行列から固有値と固有ベクトルを求めることができる。非対称回路の場合にはその鏡像回路と前後2通りの組み合わせた縦続接続回路としての対称回路の固有値と固有ベクトルとして2つの異なる影像インピーダンスを求めることができる。 まず回路中に繰り返し現れる直列インピーダンスだけの部分回路はそれ自身で対称二端子対回路を構成する。伝送行列から固有値と固有ベクトル求めると なんと固有ベクトルが一意的に定まらない。強いてあるとすれば無限大のインピーダンスということになる。一方の端子対を開放した場合、他方から見た駆動点インピーダンスが無限大のインピーダンス(開放)と等しくなるからである。 もう一方のアドミッタンスのみから成る部分回路についてもやってみよう これも同じような感じ。強いて言えばゼロのインピーダンス(短絡)しかない。一方の端子対を短絡すると他方の端子対から見た駆動点インピーダンスがゼロ(短絡)と等しくなる。 実はこれ線形代数で言う固有値が重複度2を持つケースに該当する。またこれらの行列は三角行列の格好の実例である。これらは線形代数の本で必ず出てくるがいまいち実感が湧かないでいたが、こうして目前の問題として提示されると良く調べてみようという気が起きてくる。 三角行列の固有値は上記の通りいずれも対角要素そのものとなる。という当たり前のことしか大抵の線形代数の本には書いていない。これは固有ベクトルの自由度に関係するらしいがそこまで詳しく解説している本は数少ない。また重複度2の固有値に関して一つしか固有ベクトルが得られない三角行列は対角化(スペクトル分解)できないらしいが、それに触れている本も限られる。とどのつまりこれらのケースは固有値問題が解けないのではなはだ都合が悪いので華麗にスルーする必要があったわけである。こうしたケースがあるので影像パラメータと固有値問題を関連付けることはされなくなったと思われる。 三角行列そのものの都合の良い性質(固有値が一目瞭然、一般の行列は上下2つの三角行列の積に分解できる)は線形代数の応用で随所に登場する。 とりあえず先へ進もう。 伝達インピーダンスのみ、もしくは伝達アドミッタンスのみの回路の影像パラメータは上記のような感じだが。その二つを縦続接続した場合にはどうなるのだろう? 2つの相異なる対称回路を縦続接続した場合には非対称回路となる。従ってその影像パラメータを求めるには更に鏡像回路と縦続接続した伝送行列の固有値と固有ベクトルを求める必要がある。 やっと意味のある影像インピーダンスになる。もう片方についても同様に求めると 問題の回路を良く見ると、上記の非対称回路とその鏡像回路の複数の縦続接続であることに気づく。 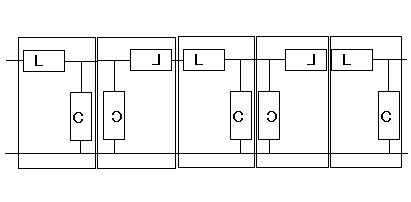 さてこの回路とその鏡像回路の縦続接続の伝送行列の固有ベクトルを求めればよいのだが、行列の積が多いので大変な式のボリュームになりそうである。なんとか線形代数的に固有ベクトルが簡単に導けるようにならないものかのう。直感的にはわかるのだが。それでは納得が行かない。 なんかもうすっかり線形代数の応用問題みたいになってしまった。 どうすんだこれ(;´Д`)。 とりあえず問題の回路は以下の様にL型回路の伝送行列とその鏡像回路の伝送行列が交互に縦続接続されたものと考えられる。そうすると全体の伝送行列は と表すことができる。またこれは非対称回路なのでそのまた鏡像回路と縦続接続した対称回路は ということになる。 同様に逆向きに縦続接続したもうひとつの対称回路の場合には ということになる。いずれもFかF'の5乗という対称形になる。 従って問題は行列のべき乗から成る行列の固有値と固有ベクトルは元の行列のそれとどういう関係が成り立つかといいう点である。 どうやらこの問いは線形代数では伝統的に自分で解き明かすべき(自ら追体験すべき)お約束の演習問題らしい。 youtubeで見たMITのLinear Algebra講義の中でこの演習問題を明瞭快活に扱っている。受講者がその場で問題を解く追体験が出来るように自然に誘導されていく。 ここではべき乗に限らずより一般的化した命題として解いてみよう。これは「ラング線形代数(下)」に出てくる演習問題である。 線形変換行列Aとしてλをその固有値、xを固有ベクトルとした場合、 が成り立つものとする。 ここでfが多項式の場合、 が成り立つというもの。これを証明すればよい。 fが多項式であるということは命題の式は ということになる。また固有値方程式からAのべき乗に関して帰納的に が成り立つことから、これを多項式に代入すると ということになる。 従ってfとして単にべき乗が与えられた場合、固有値は元の行列のべき乗になるのに対して、固有ベクトルはそのまま変わらないことになる。 このことから問題の回路の影像インピーダンスはわざわざ回路全体の伝送行列から求めずとも以下の関係から、基本対称回路の伝送行列の固有値と変わらないことが証明された。 従って影像インピーダンスは既に導いてある式から ということになる。 ふう、すっきりした(´∀` ) P.S 対称行列を複数縦続接続した場合にその固有ベクトルが変わらないのは最初に考察した伝達インピーダンスのみの二端子対回路や伝達アドミッタンスのみの二端子対回路の伝送行列の固有ベクトルの解析結果から予想はつくのだが、一般的な対称二端子対回路についてはどうなるかを証明する必要があった。著者はそれを自明なこととしているが、工学や技術の実務ではそれは許されても理数系から見るとHeavisideの演算子法となんら変わらない。 Maximaを使って全体の回路とその鏡像回路を縦続接続した伝送行列を計算させて固有ベクトルを求めれば元の単一の対称二端子対回路のそれと同じことが確認できる。コンピュータが利用できるとどうしても力づくで結果を求める安易なアプローチに頼ると智慧が得られないという恒例である。 DirichletはGaussのD.A.を常に携えて暇さえあれば新解釈を試みていたが、その口癖は「計算ではなく思考を」というものだった。Gaussは計算の達人だったので、D.A.の証明中には人知の限界に迫る量の数式が羅列してある部分もあり難解を極めた。Dicrichletは一方でGaussに最大の敬意を持つと同時に批判的精神も持ち合わせていた。これは高木貞治にもあてはまるが、彼は自身だけはその批判の対象外としていた。高木貞治はその著書「近世数学史談」でGuassの天才としての一面だけでなくその暗黒面の両面を指摘しているものの、自らの人生もいつのまにかGuassのそれと同化していった。数学者でこのことを指摘したのは谷山ー志村予想で知られる志村五郎氏唯一人である。 Dicrichletの「Notation(記号)ではなくnotion(概念)によって」の真言はRiemannにも血脈として受け継がれていった。それは近代数学の血脈と化したといっても過言ではない。半面で近代数学は抽象的になりすぎた感があり、現実問題とのつながりを極力もたないように説明されたり教えられたりする傾向にあることは否めない。 数学は物理の世界に光りを点すと言われるように、今回の問題も線型代数的な視点でみると、闇に包まれた部分が著者の解答にいくつも残されていることを明るみにすることができた。同様にいくつか光があたったものの、その姿を正確に捉えることができないものがいくつか残されている。例えば、非対称回路の伝送行列の固有値と固有ベクトルがその鏡像回路と縦続接続してできる2組の対称回路の固有値と固有ベクトルとどういった関係があるのか。予想ではそれは複素共役と良く似た関係があるように思える。それぞれの和と差を計算してみると、何かの二倍となるとか、伝達定数(固有値)が二分割した回路のそれぞれの伝達係数の和に等しくなる点とか。また2組の対称回路の固有値は同じであることを自明として扱ってきたが、ちゃんと証明してはいない。 少なくともこれらの疑問に明快に結論を出すには数学的な視点や考え方、論理が不可欠である。数学者になる必要はないが数学をお友だちにすることは非常に頼もしい。 かつての日本は勤勉さを売りにしてきたが、同じ水準の勤勉さだったなら工数単価の安いアジアの中国やベトナム、韓国、北朝鮮に敵わないだろう。そう考えると日本の将来がどういった方向に向かうべきかは自ずと見えてくる。 |
| フラット表示 | 前のトピック | 次のトピック |
| 題名 | 投稿者 | 日時 |
|---|---|---|
| |
webadm | 2010-5-20 4:53 |
| |
webadm | 2010-5-20 5:54 |
| |
webadm | 2010-5-22 23:43 |
| |
webadm | 2010-5-23 1:32 |
| |
webadm | 2010-5-23 10:12 |
| |
webadm | 2010-5-23 16:25 |
| |
webadm | 2010-5-23 16:33 |
| |
webadm | 2010-5-23 17:20 |
| |
webadm | 2010-5-23 17:58 |
| |
webadm | 2010-5-24 17:53 |
| |
webadm | 2010-5-26 11:41 |
| |
webadm | 2010-5-26 14:34 |
| |
webadm | 2010-5-26 15:14 |
| |
webadm | 2010-5-27 3:18 |
| |
webadm | 2010-5-27 13:50 |
| |
webadm | 2010-5-27 22:14 |
| |
webadm | 2010-5-29 3:39 |
| |
webadm | 2010-5-29 11:27 |
| |
webadm | 2010-5-29 11:57 |
| |
webadm | 2010-5-30 11:15 |
| |
webadm | 2010-5-30 12:37 |
| |
webadm | 2010-5-30 12:45 |
| |
webadm | 2010-6-3 12:42 |
| |
webadm | 2010-6-5 13:04 |
| |
webadm | 2010-6-5 13:44 |
| |
webadm | 2010-6-12 22:30 |
| |
webadm | 2010-6-13 5:07 |
| |
webadm | 2010-6-17 5:13 |
| |
webadm | 2010-6-17 16:21 |
| » |
webadm | 2010-6-17 19:40 |
| |
webadm | 2010-6-22 18:50 |
| |
webadm | 2010-6-25 21:54 |
| |
webadm | 2010-6-26 0:45 |
| |
webadm | 2010-6-26 11:27 |
| |
webadm | 2010-6-26 21:55 |
| |
webadm | 2010-6-27 0:05 |
| |
webadm | 2010-6-28 21:04 |
| |
webadm | 2010-6-29 18:16 |
| |
webadm | 2010-7-8 21:06 |
| |
webadm | 2010-7-28 6:11 |
| |
webadm | 2010-8-17 10:44 |
| |
webadm | 2010-8-17 20:48 |
| |
webadm | 2010-8-18 3:42 |
| |
webadm | 2010-8-21 10:11 |
| |
webadm | 2010-10-31 3:26 |
| |
webadm | 2010-11-19 2:41 |
| |
webadm | 2010-11-23 21:29 |
| |
webadm | 2010-11-25 9:18 |
| |
webadm | 2010-11-30 0:01 |
| |
webadm | 2010-11-30 9:27 |
| |
webadm | 2010-11-30 23:28 |
| |
webadm | 2010-12-3 8:26 |
| |
webadm | 2010-12-8 9:13 |
| |
webadm | 2010-12-8 10:37 |
| |
webadm | 2010-12-9 22:51 |
| |
webadm | 2010-12-10 0:17 |
| |
webadm | 2010-12-14 6:51 |
| |
webadm | 2010-12-14 7:03 |
| |
webadm | 2010-12-20 10:10 |
| |
webadm | 2010-12-20 22:52 |
| |
webadm | 2010-12-23 13:53 |
| |
webadm | 2010-12-23 21:54 |
| |
webadm | 2011-4-22 7:02 |
| |
webadm | 2011-4-22 9:38 |
| 投稿するにはまず登録を | |
