
| フラット表示 | 前のトピック | 次のトピック |
| 投稿者 | スレッド |
|---|---|
| webadm | 投稿日時: 2010-6-28 21:04 |
Webmaster  登録日: 2004-11-7 居住地: 投稿: 3084 |
反復パラメータ 今度は趣向が変わった反復パラメータに関する問題。
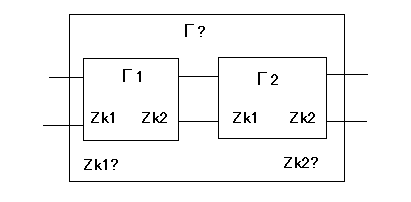 反復インピーダンスが同じで反復伝搬定数が異なる2つの二端子対回路を縦続接続した場合に反復インピーダンスと反復伝搬定数はどうなるかというもの。 前の非対称格子型回路の二分割問題や分布定数回路理論とつながりがありそうである。単一の二端子対回路が2つの部分回路の縦続接続から成るとすれば、その部分回路もまた2つ以上の部分回路の縦続接続で構成できるということになり、それを無限に分割すれば分布定数回路と同じことになる。とどのつまり集中定数型二端子対回路と等価な分布定数回路が存在する、逆も真なりという予想がたてられる。この面白いテーマについては後に学ぶ分布定数回路までとっておこう。 さて著者とは別解を考えてみよう。 ストラテジーとしてはいくつかある。 (1)題意の条件の2つの異なる部分回路の4端子定数を与えられた反復パラメータで表し、それらの縦続接続回路の4端子定数を求めて、それらから回路全体の反復パラメータを求め、与えられた部分回路の反復パラメータと比較する (2)予めいくつの仮定についてそれが与えられた条件と矛盾する結果となるか否かを数学的に示すことで正しい結論を得る。 前者は計算問題であるが、後者は複数の仮定についてそれぞれ数学的に検討しないといけないのでちょっと面倒である。 計算でやっても問題ないのでそれでいってみよう。 公式を使ってそれぞれの部分回路の4端子定数を与えられた反復パラメータで表すと ということになる。 次ぎにこの2つの部分回路を縦続接続した回路全体の4端子定数を求めると ということになる。 従って、反復伝搬定数が2つの部分回路の反復伝搬定数の和になり、反復インピーダンスは変わらないということが明らかである。 P.S さすがに展開して整理する過程を示すとすると展開式が長くなってしまうのでMaximaで確認して最終形のみを示すにとどめた。類似の問題としては、反復インピーダンスが相異なる場合にはどうなるかというのも興味深いが、式がとんでもないことになりそうなので読者の課題としよう(´∀` ) P.S 別のアイデアとしては、伝送行列を時間軸方向に縦続接続したとするとそれは何を意味するか? 無限小の2端子対回路が時間軸上で直前の時間の出力を入力として次ぎの微少時間後の出力として変換すると考える。それぞれの微少二端子対回路の端子対状態を時間軸上にプロットするとどうなるか? これはシステムの過渡応答解析を線型微分方程式を解くことなく行なえることを意味する。時間軸の無限遠点(終端)が定常状態となる。 そんなに昔ではないが某大学の先生がこのアイデアに基づいた新しい高速シミュレーターの実例を話されていたのを横で聞いていたのだが、当時は眠くてよく解っていなかった。今やっとなるほどと理解したのであった。先生の大学の教授会で同じ話しをし解ってもらえたのは学長だけだったというエピソードも含めてずっと記憶には留めていた。 また周波数軸方向に縦続接続したらどうなるか?リアルタイムスペクトルアナライザになるのかどうかは読者の想像に委ねよう(´∀` ) 実際リアルタイムシミュレーションを得るには数千とか数万個のベクトルの積和演算を同時期に行なえる特殊なmany coreシステムが必要となる。そういったハードウェアと組み合わせれば特許になるかもしれない。 眉唾な話しはこのへんでお開き(´∀` ) |
| フラット表示 | 前のトピック | 次のトピック |
| 題名 | 投稿者 | 日時 |
|---|---|---|
| |
webadm | 2010-5-20 4:53 |
| |
webadm | 2010-5-20 5:54 |
| |
webadm | 2010-5-22 23:43 |
| |
webadm | 2010-5-23 1:32 |
| |
webadm | 2010-5-23 10:12 |
| |
webadm | 2010-5-23 16:25 |
| |
webadm | 2010-5-23 16:33 |
| |
webadm | 2010-5-23 17:20 |
| |
webadm | 2010-5-23 17:58 |
| |
webadm | 2010-5-24 17:53 |
| |
webadm | 2010-5-26 11:41 |
| |
webadm | 2010-5-26 14:34 |
| |
webadm | 2010-5-26 15:14 |
| |
webadm | 2010-5-27 3:18 |
| |
webadm | 2010-5-27 13:50 |
| |
webadm | 2010-5-27 22:14 |
| |
webadm | 2010-5-29 3:39 |
| |
webadm | 2010-5-29 11:27 |
| |
webadm | 2010-5-29 11:57 |
| |
webadm | 2010-5-30 11:15 |
| |
webadm | 2010-5-30 12:37 |
| |
webadm | 2010-5-30 12:45 |
| |
webadm | 2010-6-3 12:42 |
| |
webadm | 2010-6-5 13:04 |
| |
webadm | 2010-6-5 13:44 |
| |
webadm | 2010-6-12 22:30 |
| |
webadm | 2010-6-13 5:07 |
| |
webadm | 2010-6-17 5:13 |
| |
webadm | 2010-6-17 16:21 |
| |
webadm | 2010-6-17 19:40 |
| |
webadm | 2010-6-22 18:50 |
| |
webadm | 2010-6-25 21:54 |
| |
webadm | 2010-6-26 0:45 |
| |
webadm | 2010-6-26 11:27 |
| |
webadm | 2010-6-26 21:55 |
| |
webadm | 2010-6-27 0:05 |
| » |
webadm | 2010-6-28 21:04 |
| |
webadm | 2010-6-29 18:16 |
| |
webadm | 2010-7-8 21:06 |
| |
webadm | 2010-7-28 6:11 |
| |
webadm | 2010-8-17 10:44 |
| |
webadm | 2010-8-17 20:48 |
| |
webadm | 2010-8-18 3:42 |
| |
webadm | 2010-8-21 10:11 |
| |
webadm | 2010-10-31 3:26 |
| |
webadm | 2010-11-19 2:41 |
| |
webadm | 2010-11-23 21:29 |
| |
webadm | 2010-11-25 9:18 |
| |
webadm | 2010-11-30 0:01 |
| |
webadm | 2010-11-30 9:27 |
| |
webadm | 2010-11-30 23:28 |
| |
webadm | 2010-12-3 8:26 |
| |
webadm | 2010-12-8 9:13 |
| |
webadm | 2010-12-8 10:37 |
| |
webadm | 2010-12-9 22:51 |
| |
webadm | 2010-12-10 0:17 |
| |
webadm | 2010-12-14 6:51 |
| |
webadm | 2010-12-14 7:03 |
| |
webadm | 2010-12-20 10:10 |
| |
webadm | 2010-12-20 22:52 |
| |
webadm | 2010-12-23 13:53 |
| |
webadm | 2010-12-23 21:54 |
| |
webadm | 2011-4-22 7:02 |
| |
webadm | 2011-4-22 9:38 |
| 投稿するにはまず登録を | |
