
| フラット表示 | 前のトピック | 次のトピック |
| 投稿者 | スレッド |
|---|---|
| webadm | 投稿日時: 2010-6-29 18:16 |
Webmaster  登録日: 2004-11-7 居住地: 投稿: 3082 |
影像インピーダンスと反復インピーダンス 次ぎは影像インピーダンスと反復インピーダンスをからめた問題。
4端子定数がA,B,C,Dなる二端子対回路の影像インピーダンスと反復インピーダンスが等しくなる条件を示せというもの。 これもいろいろストラテジーは考えられるが、例によって線型代数的な手法でできないか考えてみよう。 影像インピーダンスとはすなわち、非対称二端子対回路とその鏡像回路との縦続接続して出来る伝送行列の固有ベクトルの成分であることを独自に見いだした。 同様に反復インピーダンスとは非対称二端子対回路の固有ベクトルの成分であったことを独自に見いだした。 これらの2つの固有ベクトルが同じになる行列の条件を見いだせば良いことになる。 益々解らなくなってきた(;´Д`) 線型代数の演習問題としてはいいかもこれ。知力への挑戦だねこれは。 でも難しすぐる...orz 整理してみよう。線型ベクトル空間で表すと 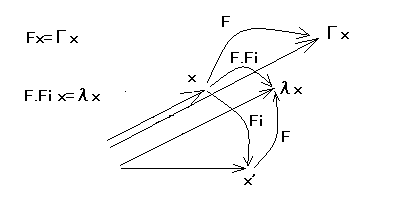 ということになる。すなわちFとF.Fiが同じ固有ベクトルを持つということになる。 わかんねえ(;´Д`) 検索でいろいろ当たってみたら、どうやらこの種の行列を扱う問題は工学系大学入試に頻繁に出る難問のひとつ、一次変換の不動直線問題と呼ばれるらしい。高校では習わないけど入試には出るので予備校では仕方なく教えることになっているらしい。 手元にある複数の線型代数の参考書(名著と呼ばれるものも含めて)、この種の話題は華麗にスルーされている感じがする。索引を見ても上記のキーワードは一切出てこない。まあ、固有空間に含まれてしまうと言えば確かにそうなのだが。線型代数学上では重箱の隅の問題らしい。 大学でも高校でも教えないことが入試問題に出るというのは矛盾している。この当たりは近年までのゆとり教育の影響で学習指導要領がそれまでと変わったためかもしれない。文部科学省の指針案によると高校の数学から行列が単位として消えることになるらすい。 結論は見えたのだが、線型代数的にどう扱えばいいのかが見えてこない。なにせ華麗にどの本でもスルーされているだけに。 言うなればこの問題は一次変換の不動直線問題の逆問題なのだ。 大学入試問題でもこんな捻った問題はさすがに出ない。 さてと答えが解ってしまっていて、それを導く方法を考えるという逆問題になってしまった。 上の図に描いている通り、3つのベクトルが並行に並んだところが所謂不動直線である。おそらくブルバキ以前の連立微分方程式の解法に由来する行列と行列式の理論の中で生まれた用語だろうけど、該当する英語は現代では見あたらない。ブルバキ以後は線型代数があらゆる数学のハブとなったため、線型代数で置き換えられた古い概念の中に不動直線や不動点が含まれていたと思われる。 理数系の人に言わせれば「不動直線なにそれ、線型写像の固有空間でひとくくりじゃん、ばーかばーか」と馬鹿にされるだろう。 二次元空間での線型変換を扱っているのに、何故に一次元の直線への写像になるかということを考えると代数幾何学の道へ踏み込むことになる。線型代数はありとあらゆる数学へつながるハブなのでそういうことは当然あり得る。線型代数学だけの閉じた世界ではない。 さてと、結論が解っていてもそれを証明する見通しの良い方法がみあたらないというのは難問の典型である。 しかも今回は結論を知らないゼロ知識から導かないといけない。数学ならば、命題で結論を出しておいてそれを証明すればいいわけだから簡単である。しかしこれは工学の問題だ、結論はほとんどのケースで予め予測できないか、無数に考えられる場合がほとんどである。数学とは違うのだよ。 映画Matrixの有名なシーンにビル飛びというのがあって、仮想世界でビルからビルへ空中を駈けるようにして飛び移るのを主人公のNeroが挑戦する場面。指南役が「心を解き放つんだ」とアドバイスを与えるもあえなく初回は地面に落下。Matrixでは様々なしがらみによって人間の行動が制限されているが、それ以外に実は制約がまったくない。それに次第に開眼していくストーリー。 数学の世界も制約やしがらみを与えているのは自分自身の狭い先入観でしかないので、それを解き放てばもっと自由な世界が見えてきてそちらへ瞬時に移ることもできる。 また数学の世界では新しい領域で新しい対象(オブジェ)を最初に見つけた人が名前を付ける権利を有する。これは人類があらゆる生物や物体(オブジェ)に名前を付けてきたのと一緒。 約一週間悩んだ末にようやく見えてきた( ̄ー ̄)ニヤリ F,Fiがそれぞれ零でない非対称な線型変換行列であるとして、以下が成り立つ零でない異なる固有値(Γ、Λ)に対して同一の固有ベクトル(x)が存在するとする 第二の式の両辺にΓ/λを乗じたものを第一の式から差し引いて得られる以下の式も成り立つ ここでF(I-(Γ/λ)Fi)が可逆であると、零でないxは存在しないことになり矛盾する。 いいとこまで来たんだけどな、どうすんだこっから(;´Д`) Fもしくは(I-(Γ/λ)Fi)のどちらかが非可逆であることが必要十分条件である。 ところでFとFiは対角要素が入れ替わっただけなので同一の固有方程式を持ち、従って同一の固有値を持つ。従ってFが固有値Γを持つとするとFiも同じ固有値Γを持つことになる。 先の式の両辺にλ/Γを乗じると ということになる。ここでΓはF及びFiの固有値であることから が成り立つ。従ってλ=Γ^2でない限り ということになり、((λ/Γ)I-Fi)は可逆ということになる。 ここで再びF及びFiは対角要素が入れ替わった相異なる非対称行列なのでF Fi≠F^2であることから、その固有値もλ≠Γ^2ということになる。従ってFが非可逆でなければならないことになる。 Fが非可逆行列である必要十分条件は ということになる。細かいところは自明なこととして証明を省略した。 最後の結論はとっくに見えていたんだけど、そこへどうやって落とし込むかが問題だった。 検索してもこの種の問題を扱っているところは皆無だし、ましてや証明など見いだせるはずもなく。我流でなんとか証明したものの未熟さは目に余るものがあるのはご勘弁を。もう少しじっくり考えればもっとエレガントな証明が得られるかもしれない。 で、実際上の条件を満たす線型変換行列の具体例を考えると、大学入試問題で良く見る不動直線問題に出てくるような行列が浮かび上がる。 これなどが得られた条件を満たしている。 F,F Fiの固有値と固有ベクトルをそれぞれ求めると ということで同じ固有ベクトルを持つこと(影像インピーダンスと反復インピーダンスが等しいこと)が確かめられた。 しかしこの問題のどこが電気回路理論なのだろうか。もうほとんど線型代数学の世界である。電気回路はその実相というべきかもしれない。 思うにこの伝送行列がはたしてどんな回路か考える問題だったら電気回路の問題になるかもしれない、それは読者の課題としよう(´∀` ) P.S 大学院の入試問題にも不動直線問題は出るらしいが、これほど捻った証明問題は出ないだろう。しかしこれを見た試験問題作成担当教官は来年の院試問題にこれをヒントに出題するかも(´∀` ) P.S 「ラング線型代数学(下)」を読み進めていたら、後半の12章 「多項式と素因子分解」の5節「ベクトル空間の分解への応用」に以下の様なほぼ不動直線とおぼしき概念がが出てくるのに遭遇した。 引用:
例1の不変部分空間は一次元なので不動直線そのものである。 この不変部分空間は、すぐ後に出てくるシュアの補助定理で重要な概念となっている。おそらくそっから先さらに別の数学の領域とつながっているのだろう。固有値の固有ベクトルは「ラング線型代数学(下)」の割りと前半にすぐ登場するが、固有空間だけは後半の上記の部分で初めて登場する。「ラング線型代数学(下)」は上巻に比べてかなり内容が専門的になって難しいが、次々と公理系を証明することで見える世界が広がるという数学の楽しさを味わうことができる。だいぶ数学的な証明の勘所みたいのがわかってくる。驚きはGaussの有名な代数学の基本定理を、線型代数学でいとも簡単にたった一文程度で証明できてしまうのは痛快だった。証明することの楽しさを味わうために美味しいところは読者に課題として残しておいてくれるのは好感が持てる(´∀` ) なるほど「不動直線」で検索しても大学受験に関するページしか出てこないけど、「不変部分空間(invariant subspace)」なら、手物の齋藤正彦 著「線型代数入門」ではさわりだけ、佐武一郎 著「線型代数学」に「不変(invariant)な部分空間(subspace)」としてかなり詳しく述べられているし検索でも多方面の数学理論のページが数え切れないほど出てくることから、「不動直線」は日本だけの狭い受験用語で、広く数学の世界では「不変部分空間」ということらしい。 |
| フラット表示 | 前のトピック | 次のトピック |
| 題名 | 投稿者 | 日時 |
|---|---|---|
| |
webadm | 2010-5-20 4:53 |
| |
webadm | 2010-5-20 5:54 |
| |
webadm | 2010-5-22 23:43 |
| |
webadm | 2010-5-23 1:32 |
| |
webadm | 2010-5-23 10:12 |
| |
webadm | 2010-5-23 16:25 |
| |
webadm | 2010-5-23 16:33 |
| |
webadm | 2010-5-23 17:20 |
| |
webadm | 2010-5-23 17:58 |
| |
webadm | 2010-5-24 17:53 |
| |
webadm | 2010-5-26 11:41 |
| |
webadm | 2010-5-26 14:34 |
| |
webadm | 2010-5-26 15:14 |
| |
webadm | 2010-5-27 3:18 |
| |
webadm | 2010-5-27 13:50 |
| |
webadm | 2010-5-27 22:14 |
| |
webadm | 2010-5-29 3:39 |
| |
webadm | 2010-5-29 11:27 |
| |
webadm | 2010-5-29 11:57 |
| |
webadm | 2010-5-30 11:15 |
| |
webadm | 2010-5-30 12:37 |
| |
webadm | 2010-5-30 12:45 |
| |
webadm | 2010-6-3 12:42 |
| |
webadm | 2010-6-5 13:04 |
| |
webadm | 2010-6-5 13:44 |
| |
webadm | 2010-6-12 22:30 |
| |
webadm | 2010-6-13 5:07 |
| |
webadm | 2010-6-17 5:13 |
| |
webadm | 2010-6-17 16:21 |
| |
webadm | 2010-6-17 19:40 |
| |
webadm | 2010-6-22 18:50 |
| |
webadm | 2010-6-25 21:54 |
| |
webadm | 2010-6-26 0:45 |
| |
webadm | 2010-6-26 11:27 |
| |
webadm | 2010-6-26 21:55 |
| |
webadm | 2010-6-27 0:05 |
| |
webadm | 2010-6-28 21:04 |
| » |
webadm | 2010-6-29 18:16 |
| |
webadm | 2010-7-8 21:06 |
| |
webadm | 2010-7-28 6:11 |
| |
webadm | 2010-8-17 10:44 |
| |
webadm | 2010-8-17 20:48 |
| |
webadm | 2010-8-18 3:42 |
| |
webadm | 2010-8-21 10:11 |
| |
webadm | 2010-10-31 3:26 |
| |
webadm | 2010-11-19 2:41 |
| |
webadm | 2010-11-23 21:29 |
| |
webadm | 2010-11-25 9:18 |
| |
webadm | 2010-11-30 0:01 |
| |
webadm | 2010-11-30 9:27 |
| |
webadm | 2010-11-30 23:28 |
| |
webadm | 2010-12-3 8:26 |
| |
webadm | 2010-12-8 9:13 |
| |
webadm | 2010-12-8 10:37 |
| |
webadm | 2010-12-9 22:51 |
| |
webadm | 2010-12-10 0:17 |
| |
webadm | 2010-12-14 6:51 |
| |
webadm | 2010-12-14 7:03 |
| |
webadm | 2010-12-20 10:10 |
| |
webadm | 2010-12-20 22:52 |
| |
webadm | 2010-12-23 13:53 |
| |
webadm | 2010-12-23 21:54 |
| |
webadm | 2011-4-22 7:02 |
| |
webadm | 2011-4-22 9:38 |
| 投稿するにはまず登録を | |
