
| フラット表示 | 前のトピック | 次のトピック |
| 投稿者 | スレッド |
|---|---|
| webadm | 投稿日時: 2010-10-31 3:26 |
Webmaster  登録日: 2004-11-7 居住地: 投稿: 3084 |
理想ジャイレーター ふう、アルバイトの仕事で忙しくなってまたしても3ヶ月近く間を空けてしまった。
結局その間収入が無く、手持ち現金が底をついて保険を解約して生活資金を捻出しているという有様。 はたらけどはたらけど....(以下省略) それでも電車で移動する間や食事の合間に訪れる貴重な自由時間は線形代数学の本や代数幾何学の本を読んで集中力を維持する毎日。最近は数学の世界がファンタジーワールドのように現実を忘れることができる世界だと感じてきている。 その都度Dirichlet伝のエピソードを思い返す。Dirichletが子供の頃にやっと買ってもらった数学書に夢中になっている時に母親が水を差すように「お前にそれはわかるまい」と言うと、少年Dirichletはこう言い返したという「いいえお母さん、僕はわかるまで読むのです」。三つ子の魂100までもという通り、Dirichletの数学に対するこの姿勢は終生変わらなかった。ゲッチンゲンにてDirichletはいつもGaussの大著D.A(Disquisitiones Arithmeticae)を常に携帯し何度も読み直していたという。 Newtonも無名時代は手に入れた数学書が理解出来ずに躓くたびに最初のページから読み直していたという。そして遂に現在あたりまえに教えられている一般二項定理を発見したことをきっかけに今日知られるNewtonに至る。 経済的に恵まれているからといって、一度読んでもわからないといって貴重な本を読むに値しないといって投げ出すことをしていないだろうか? むしろ値しないのは読み手の方ではないだろうか。 投げだしそうになっても、Dirichletの少年の頃のエピソードを思い出し、「わかるまで読む」のである。 なんの話しだったか。ああ、ジャイレータね。 これは理論の時に似たような例題をやったような気がする。 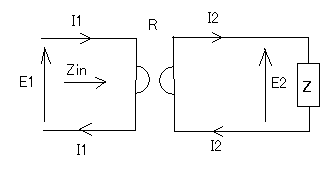 理想ジャイレータの出力端にインピーダンスZを接続した回路の入力端の駆動点インピーダンスを求め、それがZに反比例することを確かめよという問題。 色々方法はあるけど、二端子対回路として見ればインピーダンスパラメータのZ11(開放駆動点インピーダンス)がそれに該当する。 問題の回路の伝送行列を理想ジャイレータのみからなる二端子対回路とインピーダンスZのみから成る二端子対回路の縦続接続として求め、それをZパラメータ行列に変換すればよい。面倒だがやってみよう。 また例によってインピーダンス行列を伝送行列に変換すると 従って が成り立つ必要がある。最初にZ21が求められ、順次他の式に代入していくと 従って入力端の開放駆動点インピーダンスZ11はZに反比例することになる。すなわちインピーダンス変換回路のひとつであるインピーダンス反転(impedance inverter)回路となる。アナログ集積回路などでは外付けキャパシタンスをインピーダンス反転して内部でインダクタンスとして利用することが可能になる。 このあまのじゃくな解法の副産物として、理想ジャイレータを伴う回路の出力端の開放駆動点インピーダンス(Z12)は負性抵抗となることがわかる。これは当然ながら受動素子だけでは実現できない。トランジスタのような能動素子を使えば、負性抵抗も実現できることになる。 |
| フラット表示 | 前のトピック | 次のトピック |
| 題名 | 投稿者 | 日時 |
|---|---|---|
| |
webadm | 2010-5-20 4:53 |
| |
webadm | 2010-5-20 5:54 |
| |
webadm | 2010-5-22 23:43 |
| |
webadm | 2010-5-23 1:32 |
| |
webadm | 2010-5-23 10:12 |
| |
webadm | 2010-5-23 16:25 |
| |
webadm | 2010-5-23 16:33 |
| |
webadm | 2010-5-23 17:20 |
| |
webadm | 2010-5-23 17:58 |
| |
webadm | 2010-5-24 17:53 |
| |
webadm | 2010-5-26 11:41 |
| |
webadm | 2010-5-26 14:34 |
| |
webadm | 2010-5-26 15:14 |
| |
webadm | 2010-5-27 3:18 |
| |
webadm | 2010-5-27 13:50 |
| |
webadm | 2010-5-27 22:14 |
| |
webadm | 2010-5-29 3:39 |
| |
webadm | 2010-5-29 11:27 |
| |
webadm | 2010-5-29 11:57 |
| |
webadm | 2010-5-30 11:15 |
| |
webadm | 2010-5-30 12:37 |
| |
webadm | 2010-5-30 12:45 |
| |
webadm | 2010-6-3 12:42 |
| |
webadm | 2010-6-5 13:04 |
| |
webadm | 2010-6-5 13:44 |
| |
webadm | 2010-6-12 22:30 |
| |
webadm | 2010-6-13 5:07 |
| |
webadm | 2010-6-17 5:13 |
| |
webadm | 2010-6-17 16:21 |
| |
webadm | 2010-6-17 19:40 |
| |
webadm | 2010-6-22 18:50 |
| |
webadm | 2010-6-25 21:54 |
| |
webadm | 2010-6-26 0:45 |
| |
webadm | 2010-6-26 11:27 |
| |
webadm | 2010-6-26 21:55 |
| |
webadm | 2010-6-27 0:05 |
| |
webadm | 2010-6-28 21:04 |
| |
webadm | 2010-6-29 18:16 |
| |
webadm | 2010-7-8 21:06 |
| |
webadm | 2010-7-28 6:11 |
| |
webadm | 2010-8-17 10:44 |
| |
webadm | 2010-8-17 20:48 |
| |
webadm | 2010-8-18 3:42 |
| |
webadm | 2010-8-21 10:11 |
| » |
webadm | 2010-10-31 3:26 |
| |
webadm | 2010-11-19 2:41 |
| |
webadm | 2010-11-23 21:29 |
| |
webadm | 2010-11-25 9:18 |
| |
webadm | 2010-11-30 0:01 |
| |
webadm | 2010-11-30 9:27 |
| |
webadm | 2010-11-30 23:28 |
| |
webadm | 2010-12-3 8:26 |
| |
webadm | 2010-12-8 9:13 |
| |
webadm | 2010-12-8 10:37 |
| |
webadm | 2010-12-9 22:51 |
| |
webadm | 2010-12-10 0:17 |
| |
webadm | 2010-12-14 6:51 |
| |
webadm | 2010-12-14 7:03 |
| |
webadm | 2010-12-20 10:10 |
| |
webadm | 2010-12-20 22:52 |
| |
webadm | 2010-12-23 13:53 |
| |
webadm | 2010-12-23 21:54 |
| |
webadm | 2011-4-22 7:02 |
| |
webadm | 2011-4-22 9:38 |
| 投稿するにはまず登録を | |
