
| フラット表示 | 前のトピック | 次のトピック |
| 投稿者 | スレッド |
|---|---|
| webadm | 投稿日時: 2010-6-22 18:50 |
Webmaster  登録日: 2004-11-7 居住地: 投稿: 3082 |
まだまだ:影像パラメータ &0次ぎも影像パラメータに関する問題。
以下の格子型回路の(1)伝送行列、(2)Z2=Z3の場合の影像パラメータ、(3)A,Cが与えられた場合にそれを実現するZ1,Z2(ただしZ1=Z4,Z2=Z3とする)を求めよというもの 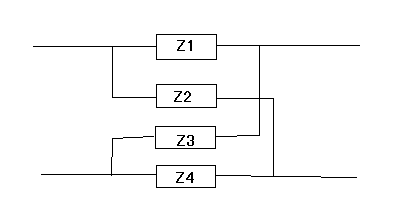 (1)伝送行列 ストラテジーとしていくつもあるが、以前にやったように2つの部分回路の並列接続として考えてみよう 従って伝送行列Fは ということになる。 おろ、著者の解とだいぶちがうぞ。どうやらA=Dとなってしまっている。もとの部分回路がそもそも対称回路なのだから、その並列接続も対称回路になってしまうのは当たり前である。まあそういうことが解っただけでも怪我の功名としよう。 別のアプローチを考えよう。S字回路とZ字回路の並列回路として考えてみよう。 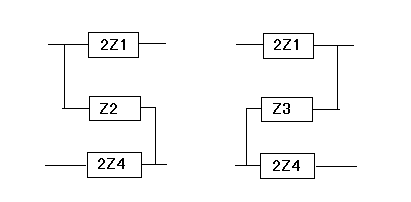 なにもそこまでしなくてもと言うかもしれないが、これも著者と同じ方法ではいけないという制約が付く以上仕方がないのである。しかし著者の解答だけ理解して素通りしてしまえば気づかずに終わってしまう隠された宝物が見つかるかもしれない。 図のように問題の回路はS字型とZ字型の2つの非対称回路の並列接続と考えることができる。最初面倒くさいなと思って気が進まなかったのだが、図を描いてみるまで気づかなかった事実を発見。S字回路とZ字回路は互いに鏡像回路となり得るという点である。Z2とZ3が同じであればまったくの鏡像回路である。Z2とZ3が異なる場合には互いに異なる非対称回路となる。 一見簡単そうに見えてこれが予想外に難しい。試験問題にはよさそうだが、捨て問題にされそうだ。確かにこんな問題今までどこでも見たことがない。もしかしてオリジナルかもしれない。 と思ったが、これもどうやらだめらしい。というのも良く考えれば上の部分回路は以下の非対称T型回路と等価になってしまう。 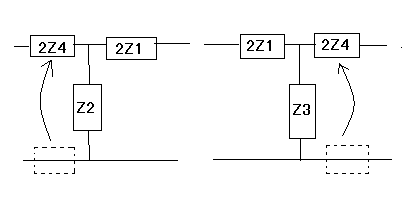 この2つを並列接続しても元の非対称格子型回路とは等価にならない。ということである。非対称格子型回路はそれ以上小さい部分回路には分割することができないということになる(*1。 ということで非対称の格子型回路の場合、結局のところ解法としては素直にそのまま解析するしかないという結論になる。それが解っただけでも収穫である。ふう、だいぶ遠回りをしてしまった。 多少でも著者と違う解とするために、アドミッタンス行列を求めてそれを伝送行列に変換することにしよう。 だがしかし('A`)マンドクセー ここまで回り道をすると奇妙なことに今まで出てきた部分回路が代数幾何で出てくるある概念と良く似たような感じがしてくる。おそらく回路網理論と代数幾何は表裏一体であるという直感が当たっているのかもしれない。今までに回路網理論と代数幾何学を結びつけて論じた本は見たことないが、もしかしたらそれが出来るかもしれない。それには代数幾何を学んで両者のつながりを明らかにしないといけないが。 部分回路はある程度まで分割するともうそれ以上分割できなくなる。それ以上分割しても係数が異なるだけの違いでしかない。インピーダンス一つから成る回路は分割してもやっぱりインピーダンス一つでしかない。複数の異なる部分回路を並列、直列、縦続接続することによって出来る回路も、基本的な部分回路の素子の定数が変わっただけにすぎなかったりする。 なんの話しだったっけ。ああ、非対称格子型回路のアドミッタンス行列ね アドミッタンスパラメータの各条件を当てはめてオームの法則、キルヒホッフの電流則など基本的な法則を使って端子対に流れる電流を求める基本的な解析だが結構やっかいでミスを犯しやすい ということになる。 これを例によって伝送行列に変換すると ということになる。ふう、手計算では限界を超える式の複雑さなのでMaximaに負うところ大であった。 次ぎに影像パラメータを鏡像回路と縦続接続した二種類の対称回路の伝送行列の固有値と固有ベクトルから求める。 2つの対称回路はZ2とZ3が入れ替わっただけなのでそれぞれ個別に導かなくても、一方の式のZ2とZ3を交換すれば計算を用いずとも導ける。 上記の行列F01,F02について固有値、固有ベクトルを求める。 Z02は計算を用いずともZ01の式でZ2とZ3が入れ替わったものになるのは自明。 また題意ではZ2=Z3の対称回路の影像インピーダンスを求めよということなので ということになる。 相変わらず数式の知恵の輪だ。Maximaで数式を処理すると一部展開してしまうので更に複雑となる。適宜部分式をMaximaでfactoringして確認しながら進めたが、最後のところはMaximaではやってくれないので自分で考えるしかなかった。 分母の負号が著者の解と違っているが固有値の式で(Z1Z4-Z2Z3)^2=(Z2Z3-Z1Z4)^2であるので、どちらも同じである。 さて最後の逆問題、AとCを与えられてZ1=Z4,Z2=Z3の時Z1,Z2をどのように決めるかというもの。 既にZ2=Z3という時点で回路は対称回路のためA=Dとなり、A,Cが与えられれば残りのBも線型受動回路では相反定理が成り立つのでAD-BC=1の関係から従属的に決定する。 従って伝送行列から以下の方程式が得られる これをZ1,Z2,Z3,Z4に関する連立方程式としてMaximaに与えて解くと という解が得られる。 P.S 予想外に非対称格子型回路の解析は複雑であった。得られた式の中に出現する項はありとあらゆる加算と乗算の組み合わせからなる。代数幾何ではイデアルと呼ばれる数学的対象なのだが回路網理論でその現物を見ることができるというのは面白い。この種のことは生命体のDNAの塩基配列とかにも有るんじゃないかなと勝手に想像してみたりする。宇宙の法則みたいななにかを感じる。 回り道をしなくてもいいのにと思うけど。他の誰も足を踏み入れないところを冒険するのは他の誰かをいつも頼りにするわけには行かないので自由で楽しくワクワクするものである。 コンピュータプログラミングの得意な読者はネットリストで与えられた任意の線型受動二端子対回路の影像パラメータを計算するソフトを書いてみるとよいかもしれない。意外に難しく未踏の分野であることがわかるかもしれない。ネットリストをコンピュータプログラムで扱うにはSPICEのそれを流用すればよい。本問題にあるように二端子定数を与えて回路定数を決定するような設計計算は高次の連立方程式を解く必要がある。これもまた未踏の領域である。 (*1 非対称格子型回路がそれ以上部分回路に分割できないというのは証明されていない。勝手な予測である。少なくとも単一の二端子対回路は非対称回路でも2つ以上の部分回路の縦続接続で構成される可能性が残されている。今回は並列接続に関してはどうやら分解できないらしいという予想されるというだけである。並列接続して得られる二端子対回路が非対称格子型回路と同じ4端子定数を持つような2つ以上の部分回路は存在しないという証明を考えるのは面白いテーマかもしれない。もちろんインピーダンスに任意の複素数を許せば存在する可能性は大きい。問題は受動素子(実数部が常に正)からのみなる2つ以上の部分回路の組み合わせは存在しないのではないかということである。これはもう数学の応用問題である。 |
| フラット表示 | 前のトピック | 次のトピック |
| 題名 | 投稿者 | 日時 |
|---|---|---|
| |
webadm | 2010-5-20 4:53 |
| |
webadm | 2010-5-20 5:54 |
| |
webadm | 2010-5-22 23:43 |
| |
webadm | 2010-5-23 1:32 |
| |
webadm | 2010-5-23 10:12 |
| |
webadm | 2010-5-23 16:25 |
| |
webadm | 2010-5-23 16:33 |
| |
webadm | 2010-5-23 17:20 |
| |
webadm | 2010-5-23 17:58 |
| |
webadm | 2010-5-24 17:53 |
| |
webadm | 2010-5-26 11:41 |
| |
webadm | 2010-5-26 14:34 |
| |
webadm | 2010-5-26 15:14 |
| |
webadm | 2010-5-27 3:18 |
| |
webadm | 2010-5-27 13:50 |
| |
webadm | 2010-5-27 22:14 |
| |
webadm | 2010-5-29 3:39 |
| |
webadm | 2010-5-29 11:27 |
| |
webadm | 2010-5-29 11:57 |
| |
webadm | 2010-5-30 11:15 |
| |
webadm | 2010-5-30 12:37 |
| |
webadm | 2010-5-30 12:45 |
| |
webadm | 2010-6-3 12:42 |
| |
webadm | 2010-6-5 13:04 |
| |
webadm | 2010-6-5 13:44 |
| |
webadm | 2010-6-12 22:30 |
| |
webadm | 2010-6-13 5:07 |
| |
webadm | 2010-6-17 5:13 |
| |
webadm | 2010-6-17 16:21 |
| |
webadm | 2010-6-17 19:40 |
| » |
webadm | 2010-6-22 18:50 |
| |
webadm | 2010-6-25 21:54 |
| |
webadm | 2010-6-26 0:45 |
| |
webadm | 2010-6-26 11:27 |
| |
webadm | 2010-6-26 21:55 |
| |
webadm | 2010-6-27 0:05 |
| |
webadm | 2010-6-28 21:04 |
| |
webadm | 2010-6-29 18:16 |
| |
webadm | 2010-7-8 21:06 |
| |
webadm | 2010-7-28 6:11 |
| |
webadm | 2010-8-17 10:44 |
| |
webadm | 2010-8-17 20:48 |
| |
webadm | 2010-8-18 3:42 |
| |
webadm | 2010-8-21 10:11 |
| |
webadm | 2010-10-31 3:26 |
| |
webadm | 2010-11-19 2:41 |
| |
webadm | 2010-11-23 21:29 |
| |
webadm | 2010-11-25 9:18 |
| |
webadm | 2010-11-30 0:01 |
| |
webadm | 2010-11-30 9:27 |
| |
webadm | 2010-11-30 23:28 |
| |
webadm | 2010-12-3 8:26 |
| |
webadm | 2010-12-8 9:13 |
| |
webadm | 2010-12-8 10:37 |
| |
webadm | 2010-12-9 22:51 |
| |
webadm | 2010-12-10 0:17 |
| |
webadm | 2010-12-14 6:51 |
| |
webadm | 2010-12-14 7:03 |
| |
webadm | 2010-12-20 10:10 |
| |
webadm | 2010-12-20 22:52 |
| |
webadm | 2010-12-23 13:53 |
| |
webadm | 2010-12-23 21:54 |
| |
webadm | 2011-4-22 7:02 |
| |
webadm | 2011-4-22 9:38 |
| 投稿するにはまず登録を | |
