
| フラット表示 | 前のトピック | 次のトピック |
| 投稿者 | スレッド |
|---|---|
| webadm | 投稿日時: 2010-12-3 8:26 |
Webmaster  登録日: 2004-11-7 居住地: 投稿: 3086 |
軸対称二端子対回路 次は軸対称二端子対回路に関する問題。
軸対称二端子対回路を内部インピーダンスZの電源と負荷インピーダンスZの間に挿入した場合の全体の伝送行列を求めよというもの。 これは基本を理解していないとだめなひっかけ問題である。どこまでを全体の二端子対回路に含めればいいか間違えやすい。 二端子対回路は線形受動回路であるという基本を忘れなければ、電源はそれに含めてはいけないことになる。 あとは軸対称二端子対回路の扱い。これも理解していないと何のことはさっぱり判らないことになる。同じ回路を入力と出力の方向を逆向きにした回路を従属接続したものと考えるのが妥当である。 従って等価電圧源回路はシリーズ内部インピーダンスのみの二端子対回路として、負荷インピーダンスは並列インピーダンスのみの二端子対回路として軸対称二端子対回路を挟むように接続されたものとして考える。 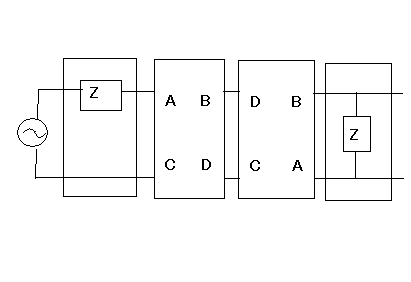 これは誰が考えても著者の解と同じ結論に辿りつくことになる。 伝送行列の縦続接続なので行列の乗法ということになるが、ここでは著者と違う計算順序で先に軸対称二端子対回路の伝送行列を計算してやってみよう。 ということになる。 P.S ちなみに脱線してへそ曲がりな発想で電源を含む二端子対回路が行列でどう表すことができるかやってみよう。 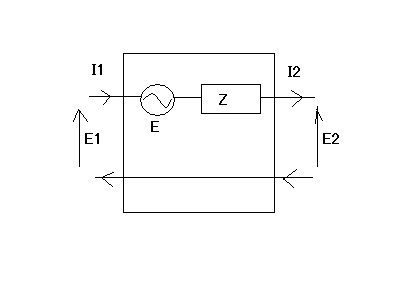 端子対条件と重ね合わせの理で以下の関係式が導かれる これは伝送行列Fによって線形写像されたベクトルを電圧源E分だけ平行移動する変換、すなわちaffine変換である。 このため回路に与える入力に対して出力は非線形となる。(E2,I2)の代わりに(E2a+E2b,I2a+I2b)を与えた場合、線形であれば(E1,I1)は(E2a,I2a)と(E2b,I2b)をそれぞれ単独で与えた場合の(E1a,I1a)と(E1b,I1b)の和と同じでなければならない。 従って線形ではなくなってしまう。 これだと都合が悪いので拡大係数行列表現を用いればaffine変換を単一の変換行列で表すことができる。 これによって乗法について線形代数の行列の乗法がそのまま使えるため合成変換が行列の積で表すことができる。 affine変換はコンピューターグラフィックスで当たり前のように用いられる。 affine変換は係数の総和が1になるような特別な線形結合(affine結合)が定義される。 同様に線形代数で定義されている線形独立(一次独立)に対応するaffine独立という概念も定義されている。 物理学ではLorentz変換がaffine変換の特殊な例で、特殊相対性理論で光速度一定の原理を示すために使われている。 意外なほどaffine変換と電気回路理論は無縁なようでほとんど関係する記事を検索で見つけることはできなかった。研究する余地がありそうである。また別の機会に。 |
| フラット表示 | 前のトピック | 次のトピック |
| 題名 | 投稿者 | 日時 |
|---|---|---|
| |
webadm | 2010-5-20 4:53 |
| |
webadm | 2010-5-20 5:54 |
| |
webadm | 2010-5-22 23:43 |
| |
webadm | 2010-5-23 1:32 |
| |
webadm | 2010-5-23 10:12 |
| |
webadm | 2010-5-23 16:25 |
| |
webadm | 2010-5-23 16:33 |
| |
webadm | 2010-5-23 17:20 |
| |
webadm | 2010-5-23 17:58 |
| |
webadm | 2010-5-24 17:53 |
| |
webadm | 2010-5-26 11:41 |
| |
webadm | 2010-5-26 14:34 |
| |
webadm | 2010-5-26 15:14 |
| |
webadm | 2010-5-27 3:18 |
| |
webadm | 2010-5-27 13:50 |
| |
webadm | 2010-5-27 22:14 |
| |
webadm | 2010-5-29 3:39 |
| |
webadm | 2010-5-29 11:27 |
| |
webadm | 2010-5-29 11:57 |
| |
webadm | 2010-5-30 11:15 |
| |
webadm | 2010-5-30 12:37 |
| |
webadm | 2010-5-30 12:45 |
| |
webadm | 2010-6-3 12:42 |
| |
webadm | 2010-6-5 13:04 |
| |
webadm | 2010-6-5 13:44 |
| |
webadm | 2010-6-12 22:30 |
| |
webadm | 2010-6-13 5:07 |
| |
webadm | 2010-6-17 5:13 |
| |
webadm | 2010-6-17 16:21 |
| |
webadm | 2010-6-17 19:40 |
| |
webadm | 2010-6-22 18:50 |
| |
webadm | 2010-6-25 21:54 |
| |
webadm | 2010-6-26 0:45 |
| |
webadm | 2010-6-26 11:27 |
| |
webadm | 2010-6-26 21:55 |
| |
webadm | 2010-6-27 0:05 |
| |
webadm | 2010-6-28 21:04 |
| |
webadm | 2010-6-29 18:16 |
| |
webadm | 2010-7-8 21:06 |
| |
webadm | 2010-7-28 6:11 |
| |
webadm | 2010-8-17 10:44 |
| |
webadm | 2010-8-17 20:48 |
| |
webadm | 2010-8-18 3:42 |
| |
webadm | 2010-8-21 10:11 |
| |
webadm | 2010-10-31 3:26 |
| |
webadm | 2010-11-19 2:41 |
| |
webadm | 2010-11-23 21:29 |
| |
webadm | 2010-11-25 9:18 |
| |
webadm | 2010-11-30 0:01 |
| |
webadm | 2010-11-30 9:27 |
| |
webadm | 2010-11-30 23:28 |
| » |
webadm | 2010-12-3 8:26 |
| |
webadm | 2010-12-8 9:13 |
| |
webadm | 2010-12-8 10:37 |
| |
webadm | 2010-12-9 22:51 |
| |
webadm | 2010-12-10 0:17 |
| |
webadm | 2010-12-14 6:51 |
| |
webadm | 2010-12-14 7:03 |
| |
webadm | 2010-12-20 10:10 |
| |
webadm | 2010-12-20 22:52 |
| |
webadm | 2010-12-23 13:53 |
| |
webadm | 2010-12-23 21:54 |
| |
webadm | 2011-4-22 7:02 |
| |
webadm | 2011-4-22 9:38 |
| 投稿するにはまず登録を | |
