
| フラット表示 | 前のトピック | 次のトピック |
| 投稿者 | スレッド |
|---|---|
| webadm | 投稿日時: 2010-5-14 12:08 |
Webmaster  登録日: 2004-11-7 居住地: 投稿: 3113 |
反復パラメータ 影像パラメータと似て非なる反復パラメータ。ものの本によっては最初に反復パラメータが説明されて、その後に影像パラメータが説明されている。
おんなじじゃんヽ(`Д´)ノ と一瞬思ったけど、実際はまったく違ってた。 違いを十分意識するところから始めないといけない。 (1)反復インピーダンス(iteration impedance) 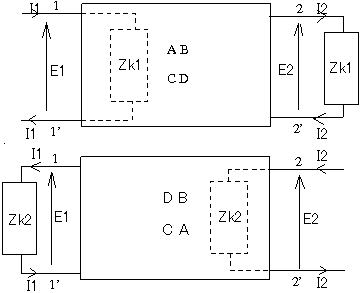 二端子対回路の端子対2-2'にZk1を接続した状態で、端子対1-1'から見た駆動点インピーダンスが同じZk1となるZk1を反復インピーダンス(iterative impedance)と呼ぶ。同じ回路で逆に端子対1-1'にZk2を接続した状態で、端子対2-2'から見た駆動点インピーダンスが同じZk2となるZk2も反復インピーダンスである。 4端子対パラメータでそれぞれの反復インピーダンスを表すと 受動回路ではインピーダンスの実数部は常に正のみ扱うので ということになる。 Zk2について同様に導くと、Fi行列なのでAとDが逆になるだけなので ということになる。 対称回路ではA=Dとなるので ということになる。 以下の様に同一の反復インピーダンスを持つ回路をいくつ縦列接続した場合でも、全体の回路が同じ反復インピーダンスを持つことになる。これが反復(iterative)と呼ばれる由来であると思われる。 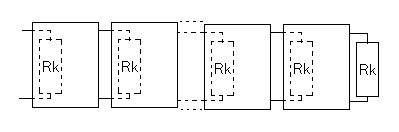 このことから一様伝送路(分布定数回路)では反復インピーダンスは特性インピーダンスと同じ意味になる。一方集中定数回路では回路固有で非対称回路では方向によっても異なるので反復インピーダンスなる用語で区別する必要があるのだろう。 (2)反復伝搬定数(iterative propagation constant) 影像パラメータの影像伝達定数と似て非なる反復パラメータの反復伝搬定数。伝達と伝搬の違いがある。どうやら伝搬定数なる用語は電信ケーブルや電話ケーブルなどの一様伝送路(分布定数回路)から持ってきたように見える。分布定数回路では入力端子対と出力端子対の間の距離に依存するが、集中定数回路は端子対の間の距離は理屈の上では存在しないので、回路網によって一意に決定される定数となる。 反復伝搬定数は以下の通り、先に反復インピーダンスを導いた時の関係,E1/E2=I1/I2により電圧、電流に対しても と定義される。 ここで先の反復インピーダンスで用いた関係式より ということになる。ここでも線形回路の相反定理、AD-BC=1を利用した。 一方上記の逆数は 従って伝搬定数を双曲線関数で表すと ということになる。 また対称回路の場合A=Dなので、伝搬定数は 対称回路の影像パラメータと同値となる。 最後に4端子パラメータを反復パラメータで表してみよう。 最初に準備として これらの関係から、4端子パラメータはそれぞれ ということになり、行列で表すと ということになる。 対称回路ではZk1=Zk2=Zkであることから ということになる。 従って対称回路では影像パラメータと同値。 やっぱり、おんなじじゃんヽ(`Д´)ノ P.S 影像パラメータの時もそうだったけど、四端子パラメータ,A,B,C,Dを影像パラメータ(Zi1,Zi2,Θ)や反復パラメータ(Zk1,Zk2,γ)で表す解を求めるのにヒューリスティックな思考錯誤で行ったが、結果的に解はすべてパラメータ、パラメータのべき根、実数係数、虚数単位(j)、それらの間の任意の加減乗除(多項式)で表されている。理数系から見れば「当たり前じゃん、ばーか、ばーか」と工学系は頭悪いという口実を与えてしまう。さすがに代数的に解くのは読者の課題としようとは、今回は言わない。代数多様体上の有理点を求める問題だからである。高額な数式処理ソフトなら自動的に解けるかもしれないが、人間が有限の種類の積み木やレゴを複数組み合わせて目的の構造を作る組み合わせを思考錯誤で見出した方が早いかもしれない。戦前にCauerはフィルタ回路合成問題が代数多様体上の有理点を求める数論的代数幾何学の問題と同値であることを明らかにしたが、当時代数多様体を研究していたのはドイツぐらいだったのと枢軸国だったので連合国で理解されたのは戦後になってからである。戦前にドイツやフランスの先端数学者から血脈を受け継いでいた日本人数学者の師弟が戦後になって次々と先駆的な仕事をしたが、工学との接点は他国に比べて皆無に近いのは何度も言うが残念である。 読者も挑戦するのは構わないが、近代数学の世界にどっぷり浸かる必要があるので、本来の問題に数年内に戻ってこれるかどうか。そっち(数学)の方で興味ある問題を見つけてしまって数学者になってしまう可能性も無きにしも非ず。いずれ誰か2つの世界の間を往復して便りをくれるものと期待しよう。 |
| フラット表示 | 前のトピック | 次のトピック |
| 題名 | 投稿者 | 日時 |
|---|---|---|
| |
webadm | 2010-5-4 1:49 |
| |
webadm | 2010-5-4 2:58 |
| |
webadm | 2010-5-7 10:21 |
| |
webadm | 2010-5-7 10:56 |
| |
webadm | 2010-5-8 0:56 |
| |
webadm | 2010-5-9 11:00 |
| |
webadm | 2010-5-10 12:46 |
| » |
webadm | 2010-5-14 12:08 |
| |
webadm | 2010-5-16 3:48 |
| |
webadm | 2010-5-16 5:27 |
| |
webadm | 2010-5-17 12:55 |
| |
webadm | 2010-5-19 17:08 |
| 投稿するにはまず登録を | |
