
| フラット表示 | 前のトピック | 次のトピック |
| 投稿者 | スレッド |
|---|---|
| webadm | 投稿日時: 2010-5-23 17:58 |
Webmaster  登録日: 2004-11-7 居住地: 投稿: 3113 |
Zobel変換 次ぎの問題は今まで登場してきたT形回路とπ形回路をそれぞれ等価変換(Zobel変換)する問題。ただしL1C1=L2C3が成り立つものとする。
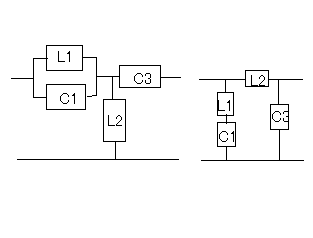 これも以前の問題の結果を利用して著者とは別解でやってみよう。 最初に見通しがよくなるようにT形回路とπ形回路を以下のように表す。 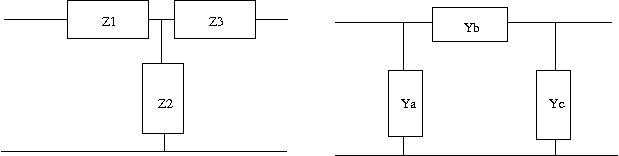 T形回路のインピーダンス行列は以前の問題の解より 同様にπ形回路のアドミッタンス行列も以前の問題の解より 一方各回路をそれぞれのパラメータで表すと 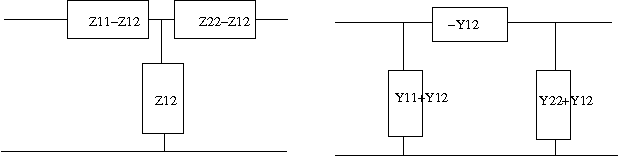 次にT形回路のアドミッタンス行列をZ1,Z2,Z3で表すと 従ってπ形回路のYa,Yb,Ycを等価なT形回路のZ1,Z2,Z3で表すと ここで題意よりT形回路のZ1,Z2,Z3は これを先のYa,Yb,Ycの式にそれぞれ代入するとL1C1=L2C3が成り立つ場合 従って等価なπ形回路は ということになる。 今度は逆にπ形回路のインピーダンス行列をYa,Yb,Ycで表すと 従ってT形回路のインピーダンスZ1,Z2,Z3をπ形回路のYa,Yb,Ycで表すと 題意よりπ形回路のYa,Yb,Ycは これを先のZ1,Z2,Z3の式に代入するとL1C1=L2C3が成り立つ場合 ということになる。 ちなみにC'3の値が著者の解答とは違っているが、こちらが正しい。著者の解はL2/L1をL1/L2と転記ミスしている。 それぞれ回路図に表すと 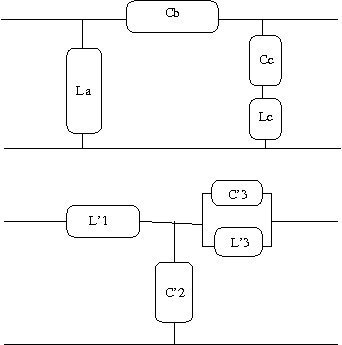 と言う結果になる。 P.S. ふう、ほとんどが計算で大変だった。最初T形回路とπ形回路の素子定数の添字を一緒にして混乱したので、改めてπ形回路由来はa,b,cでT形回路由来は1,2,3とした。途中の式の操作はMaximaを使って確認するも、入力ミスがあったりして更に頭が混乱してしまった。最後に著者の解答に驚愕の誤記があるというどんでん返しで寝込むかと思った。結局CならCだけから、LならLだけから成るように式を整えるのは人間が意図的にやらないとどうしようもなかった。 そういえばZobel変換というのは検索してもまったくひっかからない。おそらくΔ-Y等価変換と同じだと思われるが、Valkenburgによると1899年に既にA.E.KennelyがElectric World and Engineering誌の記事"The equivalence of triangles and three-point stars in conducting networks"で示しているのでZobel由来と言う人はほとんど居ないのだろう。Zobelが二端子対回路で同じことを示したのはそれからずっと後のことだし。 |
| フラット表示 | 前のトピック | 次のトピック |
| 題名 | 投稿者 | 日時 |
|---|---|---|
| |
webadm | 2010-5-20 4:53 |
| |
webadm | 2010-5-20 5:54 |
| |
webadm | 2010-5-22 23:43 |
| |
webadm | 2010-5-23 1:32 |
| |
webadm | 2010-5-23 10:12 |
| |
webadm | 2010-5-23 16:25 |
| |
webadm | 2010-5-23 16:33 |
| |
webadm | 2010-5-23 17:20 |
| » |
webadm | 2010-5-23 17:58 |
| |
webadm | 2010-5-24 17:53 |
| |
webadm | 2010-5-26 11:41 |
| |
webadm | 2010-5-26 14:34 |
| |
webadm | 2010-5-26 15:14 |
| |
webadm | 2010-5-27 3:18 |
| |
webadm | 2010-5-27 13:50 |
| |
webadm | 2010-5-27 22:14 |
| |
webadm | 2010-5-29 3:39 |
| |
webadm | 2010-5-29 11:27 |
| |
webadm | 2010-5-29 11:57 |
| |
webadm | 2010-5-30 11:15 |
| |
webadm | 2010-5-30 12:37 |
| |
webadm | 2010-5-30 12:45 |
| |
webadm | 2010-6-3 12:42 |
| |
webadm | 2010-6-5 13:04 |
| |
webadm | 2010-6-5 13:44 |
| |
webadm | 2010-6-12 22:30 |
| |
webadm | 2010-6-13 5:07 |
| |
webadm | 2010-6-17 5:13 |
| |
webadm | 2010-6-17 16:21 |
| |
webadm | 2010-6-17 19:40 |
| |
webadm | 2010-6-22 18:50 |
| |
webadm | 2010-6-25 21:54 |
| |
webadm | 2010-6-26 0:45 |
| |
webadm | 2010-6-26 11:27 |
| |
webadm | 2010-6-26 21:55 |
| |
webadm | 2010-6-27 0:05 |
| |
webadm | 2010-6-28 21:04 |
| |
webadm | 2010-6-29 18:16 |
| |
webadm | 2010-7-8 21:06 |
| |
webadm | 2010-7-28 6:11 |
| |
webadm | 2010-8-17 10:44 |
| |
webadm | 2010-8-17 20:48 |
| |
webadm | 2010-8-18 3:42 |
| |
webadm | 2010-8-21 10:11 |
| |
webadm | 2010-10-31 3:26 |
| |
webadm | 2010-11-19 2:41 |
| |
webadm | 2010-11-23 21:29 |
| |
webadm | 2010-11-25 9:18 |
| |
webadm | 2010-11-30 0:01 |
| |
webadm | 2010-11-30 9:27 |
| |
webadm | 2010-11-30 23:28 |
| |
webadm | 2010-12-3 8:26 |
| |
webadm | 2010-12-8 9:13 |
| |
webadm | 2010-12-8 10:37 |
| |
webadm | 2010-12-9 22:51 |
| |
webadm | 2010-12-10 0:17 |
| |
webadm | 2010-12-14 6:51 |
| |
webadm | 2010-12-14 7:03 |
| |
webadm | 2010-12-20 10:10 |
| |
webadm | 2010-12-20 22:52 |
| |
webadm | 2010-12-23 13:53 |
| |
webadm | 2010-12-23 21:54 |
| |
webadm | 2011-4-22 7:02 |
| |
webadm | 2011-4-22 9:38 |
| 投稿するにはまず登録を | |
