
| フラット表示 | 前のトピック | 次のトピック |
| 投稿者 | スレッド |
|---|---|
| webadm | 投稿日時: 2008-5-19 12:41 |
Webmaster  登録日: 2004-11-7 居住地: 投稿: 3094 |
ベクトル軌跡 インピーダンスやその逆数のアドミッタンスは与えられた素子の定数と周波数から位相角と大きさが決まるのは既に学んだ通り。
交流回路の設計や解析ではしばしば与えられた定数で周波数を変化させた場合や与えられた周波数で定数を変化させた場合に位相角と大きさがどう変化するのかを知る必要がある。それがベクトル軌跡である。 (1)実数部が一定なベクトルの軌跡 実数部が一定ということは虚実から実数部の値だけ離れた虚実に並行な直線を描くベクトル軌跡ということになる。 例えば簡単なRLC直列回路でLとCの値を変化させた場合や、周波数を変化させた場合が相当する。RLC並列回路ではリアクタンス成分が実数部にも含まれるため定数や周波数を変えると実数部も変化してしまうので単純には当てはまらない。 リアクタンスは誘導性と容量性とで正と負の値を取り得るので正の∞から負の∞まで伸びる。 (2)虚数部が一定なベクトルの軌跡 虚数部が一定ということは実軸から虚数部の値だけ離れた実軸に並行な直線を描くベクトル軌跡ということになる。 回路的にはRLC直列回路で一定の周波数で抵抗値を変化させた場合ということになる。抵抗値は負の値はとらないので、0から正の∞まで伸びる。 (3)実数部一定なベクトルZ1と一定ベクトルZ2の積の軌跡 ベクトルの積というのは複素電流と複素電圧の積で表される複素電力である。片方が実数部一定ということは直列回路でリアクタンス値を変化させた場合が該当する。もしくは一定ベクトルZ2が抵抗のみで構成されていて周波数を変化させた場合が該当する。 ベクトルの積は、複素平面上ではベクトル座標軸の回転を意味する。 Z1=x1+jy1 Z2=x2+jy2 Z1*Z2=(x1+jy1)*(x2+jy2) =(x1*x2-y1*y2)+j(x1*y2+y1*x2) Z2の位相角をφとすると x2=|Z2|*cosφ y2=|Z2|*sinφ で表されるのでそれぞれ代入すると Z1*Z2=(x1*|Z2|*cosφ-y1*|Z2|*sinφ)+j(x1*|Z2|*sinφ+y1*|Z2|*cosφ) これをベクトル図で表すと 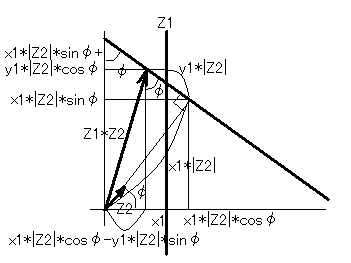 ということになる。ちょうどZ2の位相角φだけZ1の軌跡を回転させかつその大きさをZ2の絶対値倍したものということになる。 (4)実数部一定なベクトルの逆数の軌跡 ちょっとこれはややこしい。実数部が一定のベクトル Z=x+jy の逆数をYとすると Y=1/(x+jy)=(x-jy)/((x+jy)*(x-jy)) =(x-jy)/(x^2+y^2) =x/(x^2+y^2)-jy/(x^2+y^2) で表され、xが一定でyが変化するとYの実数部(実効コンダクタンス)と虚数部(実効サセプタンス)はどうなるか? 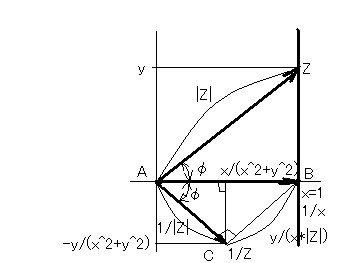 便宜的にx=1とすると、y=0の時はZ=1/Zとなる。1/ZはZの共役複素数をZの大きさでスケールしたものであることがわかる。従ってZが大きくなればなるほど1/Zは小さくなり、ベクトルの先端は原点に近づくことになる。これは何だろう。この方式でベクトル軌跡を描くと都合が良いのは、ベクトル軌跡が無限遠に遠ざかってしまうことが無いということである。この都合の良い点は後にスミスチャートの等抵抗軌跡とかアドミッタンスチャートの等コンダクタンス軌跡として応用されているものなのでしっかりと理解しておく必要がある。 著者は強引に円の方程式にもっていっているが、もっと別のやりかたはないものか。 ベクトル図からわかることは任意のyの時の1/Zの点とy=0及びy=∞の時の1/Zの点の間を直線で結ぶ三角形の辺の関係は AB=1/x AC=1/|Z| CB=sqrt((1/x-x/(x^2+y^2))^2+(-y/(x^2+y^2))^2) =sqrt(1/x^2-2/(x^2+y^2)+x^2/(x^2+y^2)^2+y^2/(x^2+y^2)^2) =sqrt(1/x^2-2/(x^2+y^2)+(x^2+y^2)/(x^2+y^2)^2) =sqrt(1/x^2-2/(x^2+y^2)+1/(x^2+y^2)) =sqrt(1/x^2-1/(x^2+y^2)) =sqrt((x^2+y^2-x^2)/(x^2*(x^2+y^2))) =y/(x*sqrt(x^2+y^2)) =y/(x*|Z|) ここで sqrt(AC^2+CB^2) =sqrt(1/|Z|^2+(y/(x*|Z|))^2) =sqrt(1+y^2/x^2)/|Z| =1/x 従って AB = sqrt(AC^2+CB^2) という関係が常に成り立つ。 これは三角形が直角三角形であることを示しているが、軌跡が円を描くことまでは証明できない。 学生の頃だったら、これは円になるのだと参考書通りの式の導き方を暗記してすませるところだけど、今回は納得が行かないので自分で導くしかない。 ベクトル軌跡はたしか計測工学でナイキスト判定とかにも出てきた記憶があるが、当時はさっぱりチンプンかんぷんで酷い成績だったのだけは憶えている。制御システム設計やアナログ回路設計者には習得が必須のものだったと知ったのは社会に出てからである。 さてYの式の実数部と虚数部をそれぞれ α=x/(x^2+y^2) β=-y/(x^2+y^2) と置くとYは Y=α+jβ で表される。円の中心点を(a,0)とし半径をrとすると (α-a)^2+β^2=r^2 が成り立つなら軌跡は円を描くと言える。上の式を展開すると α^2-2aα+a^2+β^2-r^2=0 一方で α^2+β^2=(x/(x^2+y^2))^2+(-y/(x^2+y^2))^2 =1/(x^2+y^2) =α/x α^2+β^2-α/x=0 であることからa及びrの関係は -2aα=-α/x ∴a=1/(2*x) a^2-r^2=0 ∴r=a=1/(2*x) ということになる。 従って円の中心が(1/(2*x),0)で半径が1/(2*x)の円の方程式 (α-1/(2*x))^2+β^2=(1/(2*x))^2 で表されることになる。 他にも円を幾何学的に解析することで証明方法はいくつもあり、極座標の円の方程式や円の接線の式から導くことができる。 実際にコンピューターでグラフを描こうとするとまた面倒である。XとY座標が独立に計算しなければならないので単純に実軸にそって描くというわけにはいかない。ある実軸に対して解が2つあるからである。 (5)虚数部一定なベクトルの逆数の軌跡 これは(4)とは逆で実数部が可変で虚数部が固定のインピーダンスの逆数の軌跡。 Z=x+jy でyが固定でxが0〜∞に変化するときその逆数 Y=x/(x^2+y^2)-jy/(x^2+y^2) との関係をベクトル図で表すと 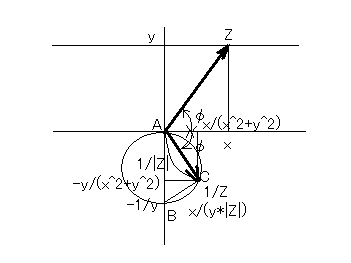 AB=1/y AC=1/sqrt(x^2+y^2) CB=sqrt((x/(x^2+y^2))^2+(y/(x^2+y^2)-1/y)^2) =x/(y*sqrt(x^2+y^2)) =x/(y*|Z|) ここで AB^2+AC^2=(1/y)^2+1/(x^2+y^2) =x^2/(y^2*(x^2+y^2)) =CB^2 であることから虚軸上に中心点を持ち虚軸の0と-1/yを通る円であると予測される。 実数部と虚数部をそれぞれα、βとし、円の中心を(0,-f)とすると α=x/(x^2+y^2) β=-y/(x^2+y^2) α^2+(β+f)^2=r^2 が成り立てば良い。展開すると α^2+β^2+2fβ+f^2-r^2=0 ここで α^2+β^2=(x/(x^2+y^2))^2+(-y/(x^2+y^2))^2 =x^2/(x^2+y^2)^2+y^2/(x^2+y^2)^2 =1/(x^2+y^2) =-β/y なのでαβ項を含まないためこの二次方程式は円の方程式であると言える。 従って 2fβ+f^2-r^2=β/y であることから f=1/(2*y) r=f=1/(2*y) ということになり、(0,-1/(2*y))を中心として半径1/(2*y)の円であると言える。 (6)直線を描くベクトルの逆数の軌跡 ここまでは実数部もしくは虚数部のみが変化するベクトルの逆数の軌跡だったが、どちらも変化して直線を描くベクトルとして先の2つを一般化したもの。(3)の実数部が固定のベクトルと一定のベクトルの積の逆数でもある。 Z=x+jy Y=1/Z=x/(x^2+y^2)-jy/(x^2+y^2) =α+jβ α=x/(x^2+y^2) β=-y/(x^2+y^2) と同じだがx,y共に変化する点が異なる。ちょうど(5)の図をZと1/Zの軌跡を原点を中心にそれぞれ逆向きに同じ角度だけ回転させたよう感じになることが予想される。 x=0の時に虚軸上のmを通る傾き-nのインピーダンス軌跡では y=m-n*x という関係が成り立つのでインピーダンスの式は Z=x+j*(m-n*x) となる。ここで逆数は Y=1/Z=1/(x+i*(m-n*x)) =(x-i*(m-n*x))/((x+i*(m-n*x))*(x-i*(m-n*x))) =(x-i*(m-n*x))/(x^2+(m-n*x)^2) =x/(x^2+(m-n*x)^2)-i*(m-n*x)/(x^2+(m-n*x)^2) と表される。ここでn=0の場合は Y=x/(x^2+m^2)-i*m/(x^2+m^2) となり虚数部が固定のインピーダンスの逆数の式を包含していることを意味する。 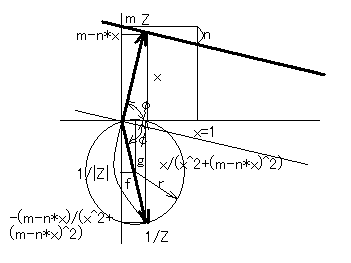 ここで α^2+β^2=1/(x^2+y^2) であるので α^2+β^2=α/x=-β/y でもある。従って x=α/(α^2+β^2) y=-β/(α^2+β^2) と表すことができる。これを y=m-n*x にそれぞれ代入すると -β/(α^2+β^2)=m-n*α/(α^2+β^2) 両辺に(α^2+β^2)/mを乗じると -β/m=α^2+β^2-(n/m)*α 整理すると α^2+β^2+β/m-α*(n/m)=0 という関係式が得られる。αは実軸の座標、βは虚軸の座標であるので、α・βの項が無いのでこの式は円の方程式を表す。 円の中心点の座標を(g,f),半径をrとした場合、円の方程式は (α-g)^2+(β-f)^2=r^2 と表されるので展開すると α^2-2gα+g^2+β^2-2fβ+f^2-r^2=0 ここで先の方程式から α^2-2gα+g^2+β^2-2fβ+f^2-r^2=α^2+β^2+β/m-α*(n/m) であることから、 -2gα+g^2-2fβ+f^2-r^2=β/m-α*(n/m) が成り立つg,f,rは g=n/(2*m) f=-1/(2*m) r=sqrt(g^2+f^2)=sqrt(n^2/(2*m)^2+1/(2*m)^2) =sqrt(n^2+1)/(2*m) ということになる。 今度は同じ直線でも実軸と交わるインピーダンス軌跡を考えてみる。 実軸とy=0,x=mで交わり、yが1変化するとxがnずつ減少するとすると x=m-n*y これをyの式に書き直すと y=(m-x)/n という関係が成り立つ。これも今までと同様にZが大きくなるにつれ1/Zは小さくなり原点に限りなく近づく。従ってその逆数の軌跡は原点を通る円になることが予想される。 Z=x+jy Y=1/Z=x/(x^2+y^2)-iy/(x^2+y^2) α=x/(x^2+y^2) β=-y/(x^2+y^2) と置くと Y=1/Z=α+iβ で表されそれが円の軌跡を描く場合、中心が(g,f)で半径がrとすると (α-g)^2+(β-f)^2=r^2 なる関係が成り立つ。また 円は原点を通るので g^2+f^2=r^2 なる関係も今までと同様に成立する。 ここで α^2+β^2=x^2/(x^2+y^2)^2+(-y)^2/(x^2+y^2) =1/(x^2+y^2) =α/x =-β/y 従って x=α/(α^2+β^2) y=-β/(α^2+β^2) これを y=(m-x)/n にそれぞれ代入すると -β/(α^2+β^2)=(m-α/(α^2+β^2))/n 両辺にn*(α^2+β^2)を乗じて整理すると -n*β=m*(α^2+β^2)-α 従って α^2+β^2-α/m+n*β/m=0 が成り立つ。これはα・βの項が無いので円の方程式である。 これと先ほどの(g,f)を中心として半径rの円の公式を展開すると α^2+β^2-2gα-2fβ+g^2+f^2-r^2=0 g^2+f^2=r^2 α^2+β^2=α/m-n*β/m であるので g=1/(2*m) f=-n/(2*m) r=sqrt(g^2+f^2)=sqrt(1^2/(2*m)^2+(-n)^2/(2*m)^2) =sqrt(1+n^2)/(2*m) ということになる。すなわち中心が(1/(2*m),-n/(2*m))で半径がsqrt(1+n^2)/(2*m)の円を描くことになる。 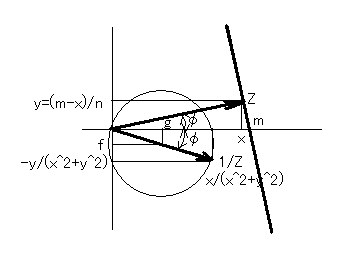 (7)円を描くベクトルの逆数の軌跡 著者は円を描くベクトルの逆数の軌跡もやはり円となるとだけしか書いてなく詳説は省略している。前に直線を描くベクトルの逆数が円となるケースをやっているのでおかしいと普通は思う。著者はおそらくここですべてのケースを一般化して説明しようと思ったが、体調が悪くて筆が進まなかったかで詳しい説明は省略されている。 では円を描くベクトルの逆数の軌跡が円になるケースは本当にあるのだろうか? いままで扱ってきたのは原点を通る円を描くベクトルの軌跡だった。それらの逆数はいずれも直線を描くということを見てきた。 扱っていないのは原点を通らない円を描くベクトルの軌跡とその逆数の軌跡。 例えば、単純なRLC直列回路のインピーダンスはLとCを可変すると原点からRだけ離れて虚軸に並行な直線を描く。これの逆数(アドミッタンス)は原点を通る円を描くことになる。アドミッタンスの軌跡が原点を通らない円を描くようにするには一定のベクトルを加算すれば良い。すなわちRLC直列回路に並列に一定の抵抗を接続すれば円は虚実からその抵抗値の逆数(コンダクタンス)だけ並行移動することになる。 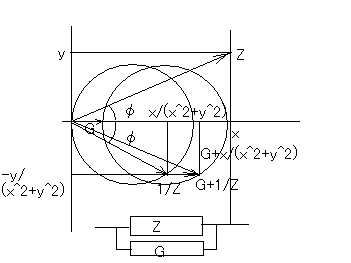 Z=x+jy Y=1/Z=x/(x^2+y^2)-jy/(x^2+y^2) Gを並列につないだ場合の合成アドミッタンスをY'とすると Y'=G+Y=G+x/(x^2+y^2)-jy/(x^2+y^2) と表すことができる。これの逆数をZ'とすると Z'=1/Y'=1/(G+Y)=1/(G+x/(x^2+y^2)-jy/(x^2+y^2)) =(G+x/(x^2+y^2)+jy/(x^2+y^2))/((G+x/(x^2+y^2)-jy/(x^2+y^2))*(G+x/(x^2+y^2)+jy/(x^2+y^2))) =(G+x/(x^2+y^2)+jy/(x^2+y^2))/((G+x/(x^2+y^2))^2+(y/(x^2+y^2))^2) =(G+x/(x^2+y^2)+jy/(x^2+y^2))/((G^2+2G*x/(x^2+y^2)+x^2/(x^2+y^2)^2)+y^2/(x^2+y^2)^2) =((x^2+y^2)*G+x+jy)/((x^2+y^2)*G^2+2G*x+x^2/(x^2+y^2)+y^2/(x^2+y^2)) =((x^2+y^2)*G+x+jy)/((x^2+y^2)*G^2+2G*x+1) =((x^2+y^2)*G+x)/((x^2+y^2)*G^2+2G*x+1)+jy/((x^2+y^2)*G^2+2G*x+1) ということになる。はたしてこれはどんな軌跡を描くのだろうか? 上の式のままだと複雑過ぎるので以前のように α=x/(x^2+y^2) β=-y/(x^2+y^2) とおくと Y=α+jβ Y'=G+α+jβ 従ってその逆数Z'は Z'=1/Y'=1/(G+α+jβ) =(G+α-jβ)/((G+α+jβ)*(G+α-jβ)) =(G+α-jβ)/((G+α)^2+β^2) =(G+α)/((G+α)^2+β^2)-jβ/((G+α)^2+β^2) と表される。これはG=0とした場合ちょうど Y=x/(x^2+y^2)-jy/(x^2+y^2) のxをα,yをβと置き換えた場合と同じであるので円を描くことが予想される。しかしまてよG=0とした場合は直線になるんじゃなかったのか? 先のG,x,yで表したZ'の式でG=0とすると Z'=((x^2+y^2)*G+x)/((x^2+y^2)*G^2+2G*x+1)+jy/((x^2+y^2)*G^2+2G*x+1) =((x^2+y^2)*0+x)/((x^2+y^2)*0^2+2*0*x+1)+jy/((x^2+y^2)*0^2+2*0*x+1) =x+jy となって直線を表す式となる。なんだそうだったのか。 そこで一定のコンダクタンスとサセプタンスを並列に接続し α'=G+α β'=B+β と置いてアドミッタンスの式を一般化すると Y''=α'+jβ' その逆数は Z''=1/Y''=1/(α'+jβ') =(α'-jβ')/((α'+jβ')*(α'-jβ')) =(α'-jβ')/(α'^2+β'^2) =α'/(α'^2+β'^2)-jβ'/(α'^2+β'^2) と表される。 これを展開すると Z''=(G+α)/((G+α)^2+(B+β)^2)-j(B+β)/((G+α)^2+(B+β)^2) =(G+x/(x^2+y^2))/((G+x/(x^2+y^2))^2+(B-y/(x^2+y^2))^2)-j(B-y/(x^2+y^2))/((G+x/(x^2+y^2))^2+(B-y/(x^2+y^2))^2) =(G+x/(x^2+y^2))/(G^2+2*G*x/(x^2+y^2)+x^2/(x^2+y^2)^2+B^2-2*B*y/(x^2+y^2)+y^2/(x^2+y^2)^2)-j(B-y/(x^2+y^2))/(G^2+2*G*x/(x^2+y^2)+x^2/(x^2+y^2)^2+B^2-2*B*y/(x^2+y^2)+y^2/(x^2+y^2)) =((x^2+y^2)*G+x)/((x^2+y^2)*G^2+2*G*x+x^2/(x^2+y^2)+(x^2+y^2)*B^2-2*B*y+y^2/(x^2+y^2))-j((x^2+y^2)*B-y)/((x^2+y^2)*G^2+2*G*x+x^2/(x^2+y^2)+(x^2+y^2)*B^2-2*B*y+y^2/(x^2+y^2)) =((x^2+y^2)*G+x)/((x^2+y^2)*G^2+2*G*x+(x^2+y^2)*B^2-2*B*y+1)-j((x^2+y^2)*B-y)/((x^2+y^2)*G^2+2*G*x+(x^2+y^2)*B^2-2*B*y+1) G=0,B=0を代入すれば Z''=((x^2+y^2)*0+x)/((x^2+y^2)*0^2+2*0*x+(x^2+y^2)*0^2-2*0*y+1)-j((x^2+y^2)*0-y)/((x^2+y^2)*0^2+2*0*x+(x^2+y^2)*0^2-2*0*y+1) =x+jy と直線を表す式になる。ではGもしくはBのいずれかまたは両方が0以外の場合に果たして円を描くのかどうかが問題。 なんか証明のストラテジがおかしい。だいたいZ=x+jyといっても直線じゃなく単に任意のベクトルを表しているだけだし。 この場合は、ベクトル Z=x+jy の軌跡が中心(g,f)で半径rの円を描く場合 (x-g)^2+(y-f)^2=r^2 が成り立つことからはじめる必要がある。 ストラテジとしては、上のベクトルの逆数の座標でxとyをそれぞれ表して上記の円の式に代入し、その結果もまた円の方程式になれば良いことになる。 Zの逆数は Y=1/Z=1/(x+jy) =x/(x^2+y^2)-jy/(x^2+y^2) ここで x1=x/(x^2+y^2) y1=-y/(x^2+y^2) とすると x1^2+y1^2=1/(x^2+y^2) =x1/x =-y1/y 従って x=x1/(x1^2+y1^2) y=-y1/(x1^2+y1^2) なる関係が成立する。これを元の円の方程式に代入し展開すると (x-g)^2+(y-f)^2-r^2 =(x1/(x1^2+y1^2)-g)^2+(-y1/(x1^2+y1^2)-f)^2-r^2 =x1^2/(x1^2+y1^2)^2-2*g*x1/(x1^2+y1^2)+g^2+y1^2/(x1^2+y1^2)^2+2*f*y1/(x1^2+y1^2)+f^2-r^2 =(x1^2+y1^2)/(x1^2+y1^2)^2-2*g*x1/(x1^2+y1^2)+g^2+2*f*y1/(x1^2+y1^2)+f^2-r^2 =1/(x1^2+y1^2)-2*g*x1/(x1^2+y1^2)+g^2+2*f*y1/(x1^2+y1^2)+f^2-r^2 =0 両辺に(x1^2+y1^2)を乗じると 1-2*g*x1+2*f*y1+(g^2+f^2-r^2)*(x1^2+y1^2)=0 円が原点を通る場合には円の中心と原点の距離は半径と等しくなるので g^2+f^2-r^2=0 となるためこの式は 1-2*g*x1+2*f*y1=0 ∴y1=(g/f)*x1-1/(2*f) という直線となる。 また円が原点を通らない場合には円の中心と原点の距離は半径と等しく無いので g^2+f^2-r^2≠0 となるため 1-2*g*x1+2*f*y1+(g^2+f^2-r^2)*(x1^2+y1^2)=0 の式を(g^2+f^2-r^2)で両辺を割ると 1/(g^2+f^2-r^2)-2*g*x1/(g^2+f^2-r^2)+2*f*y1/(g^2+f^2-r^2)+x1^2+y1^2=0 これはx1*y1の項を含まない二次方程式なので円を表すことは明らかである。 実際にこの円の中心点と半径がどうなるかは,円の中心点を(G,F)として半径をRとすると (x1-G)^2+(y1-F)^2-R^2=0 が成り立つことから、展開すると x1^2-2*G*x1+G^2+y1^2-2*F*y1+F^2-R^2 これが先に導いた方程式と等しくなることから x1^2-2*G*x1+G^2+y1^2-2*F*y1+F^2-R^2 =1/(g^2+f^2-r^2)-2*g*x1/(g^2+f^2-r^2)+2*f*y1/(g^2+f^2-r^2)+x1^2+y1^2 整理すると -2*G*x1+G^2-2*F*y1+F^2-R^2 =1/(g^2+f^2-r^2)-2*g*x1/(g^2+f^2-r^2)+2*f*y1/(g^2+f^2-r^2) 従って G=g/(g^2+f^2-r^2) F=-f/(g^2+f^2-r^2) R=sqrt(G^2+F^2-1/(g^2+f^2-r^2)) =sqrt(g^2/(g^2+f^2-r^2)^2+f^2/(g^2+f^2-r^2)^2-(g^2+f^2-r^2)/(g^2+f^2-r^2)^2) =sqrt(r^2/(g^2+f^2-r^2)^2) =r/(g^2+f^2-r^2) ということになる。 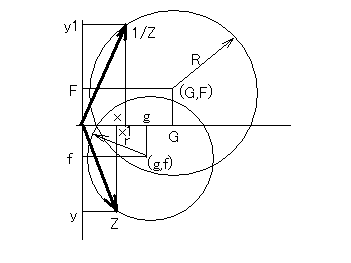 まだベクトルの軌跡に関してはいろいろ応用研究余地がある。円を描くベクトルに一定ベクトルを乗じた合成ベクトルの逆数の軌跡がどうなるかとか。 当面は交流回路の電流や電圧を周波数や回路定数を変えた場合にどういう軌跡を描くかを解析するにはこの程度の理解でも十分だということであまり深入りしていない気がする。直流回路を扱う場合にはインピーダンスの足し算と電圧ベクトルを扱うのが易しいが、並列回路は逆にアドミッタンスの足し算と電流ベクトルを扱うのが易しい。互いに逆の軌跡を知りたい場合には、計算しやすい方でベクトルの軌跡を求め、それから逆数の軌跡を求めるという方法がとられる。交流電動機の解析にはこれらの手法が欠かせないらしい。 とりあえずベクトル軌跡はここまでとしよう。 |
| フラット表示 | 前のトピック | 次のトピック |
| 題名 | 投稿者 | 日時 |
|---|---|---|
| |
webadm | 2008-5-10 10:38 |
| |
webadm | 2008-5-14 10:59 |
| |
webadm | 2008-5-15 11:15 |
| |
webadm | 2008-5-18 4:00 |
| » |
webadm | 2008-5-19 12:41 |
| 投稿するにはまず登録を | |
